VUAV-TinyV7 Flight Controller¶
The VUAV-TinyV7 flight controller is manufactured by V-UAV. This page summarizes the board support currently in ArduPilot for the “VUAV-TinyV7” target.
Features¶
STM32H743 microcontroller
2MB flash
Dual IMUs: ICM45686 and BMI088
On-board barometer
On-board compass support
FRAM for parameter storage
microSD card slot
RGB status LED
Safety switch support
IMU heater support
5 UARTs plus USB
12 PWM outputs, with bi-directional DShot support on outputs 1 to 8
I2C support
1 CAN bus
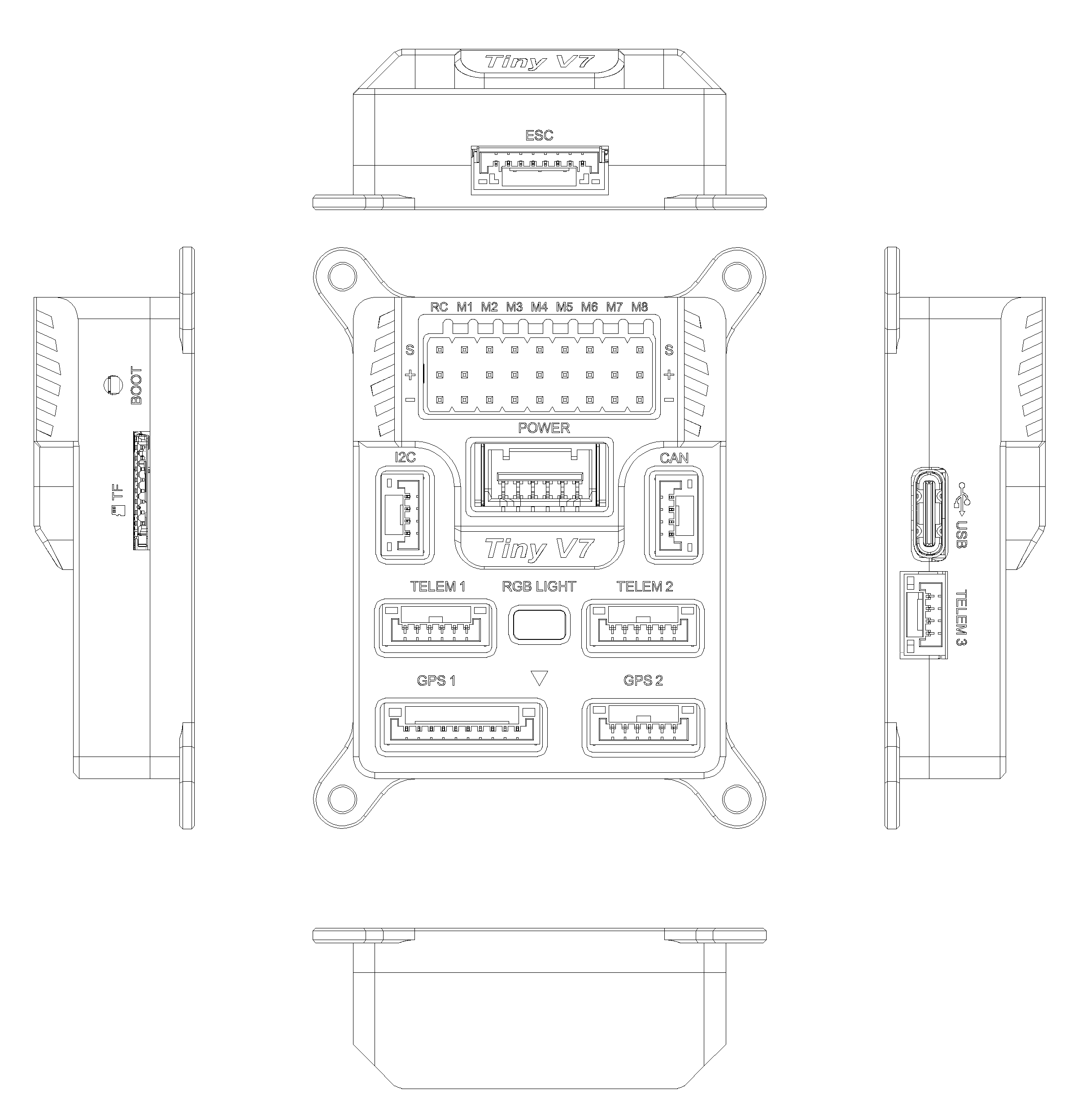
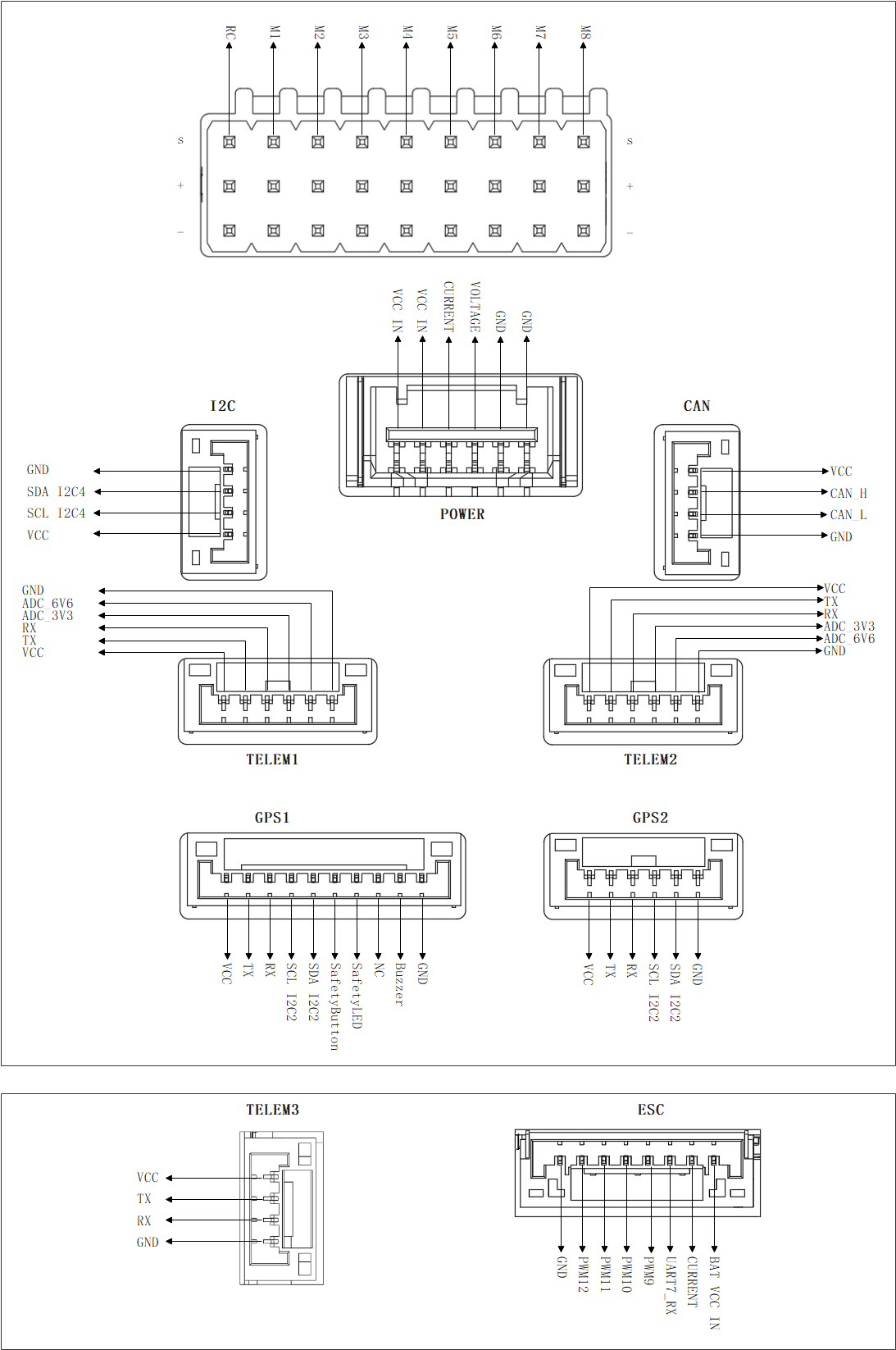
Pinout¶
UART Mapping¶
The default serial port mapping is:
SERIAL0 -> USB (MAVLink2)
SERIAL1 -> USART2 (MAVLink2, Telem1, DMA-enabled)
SERIAL2 -> UART5 (MAVLink2, Telem2, DMA-enabled)
SERIAL3 -> USART1 (GPS1, DMA-enabled)
SERIAL4 -> USART3 (GPS2, DMA-enabled)
SERIAL5 -> UART7 (USER, Telem3, DMA-enabled)
SERIAL6 -> USB OTG2 (SLCAN)
The TELEM1 port includes RTS/CTS. The other exposed UARTs do not.
RC Input¶
The dedicated RC input is on the RCIN pin and supports all unidirectional RC protocols.
For bi-directional protocols such as CRSF/ELRS, any suitable serial port can be configured with SERIALn_PROTOCOL = 23 and the receiver connected to that port’s TX/RX pins.
See RC control systems for protocol-specific setup details.
PWM Output¶
The VUAV-TinyV7 supports up to 12 PWM outputs. Outputs 1 to 8 support bi-directional DShot.
The outputs are grouped as follows:
PWM 1 to 4 in group 1
PWM 5 to 8 in group 2
PWM 9 to 10 in group 3
PWM 11 to 12 in group 4
Channels within the same group must use the same output rate. If any channel in a group uses DShot, then all channels in that group must use DShot.
GPIOs¶
All PWM outputs can also be used as GPIOs for relays, RPM sensors, buttons, and similar functions.
The GPIO numbers for the PWM outputs are:
PWM Output |
GPIO |
|---|---|
PWM1 |
50 |
PWM2 |
51 |
PWM3 |
52 |
PWM4 |
53 |
PWM5 |
54 |
PWM6 |
55 |
PWM7 |
56 |
PWM8 |
57 |
PWM9 |
58 |
PWM10 |
59 |
PWM11 |
60 |
PWM12 |
61 |
Analog Inputs¶
The board exposes several ADC inputs, including:
Primary battery voltage
Primary battery current
Secondary battery voltage
Two spare ADC inputs
5V rail sensing
Servo rail voltage sensing
Battery Monitoring¶
The board includes built-in battery monitor defaults for the primary power input:
BATT_MONITOR = 4
BATT_VOLT_MULT 20.0
BATT_AMP_PERVLT 24.0
A secondary voltage-only monitor can also be enabled for the ESC power input:
BATT2_MONITOR = 3 to enable
Preset defaults:
BATT2_VOLT_PIN = 10
BATT2_VOLT_MULT = 10.09
Compass¶
The hardware definition includes on-board compass support. As with most compact autopilots, users operating near high-current wiring or power electronics may still get better magnetic performance from an external compass mounted away from the flight controller, while disabling the internal compass.
Loading Firmware¶
Firmware for the board can be found on the ArduPilot Firmware Server in the folders named “VUAV-TinyV7” for each vehicle type.
The board includes an ArduPilot-compatible bootloader, so firmware can be loaded with any compatible ground station using the “.apj” files.