Brahma F4¶
The BrahmaF4 is an autopilot manufactured by Darkmatter®
Features¶
MCU: STM32F405RGT6, 168MHz
Gyro: BMI270
32MB Onboard Flash (32 Megabyte)
BEC output: 5V, 2A@4V
Barometer: BMP280
OSD: AT7456E
4 UARTS: (UART1, UART3, UART4, UART6)
9 PWM Outputs (includes 1 neopixel out that can be used for PWM)
5V Power Out: 2.0A max
9V Power Out: 2.0A max
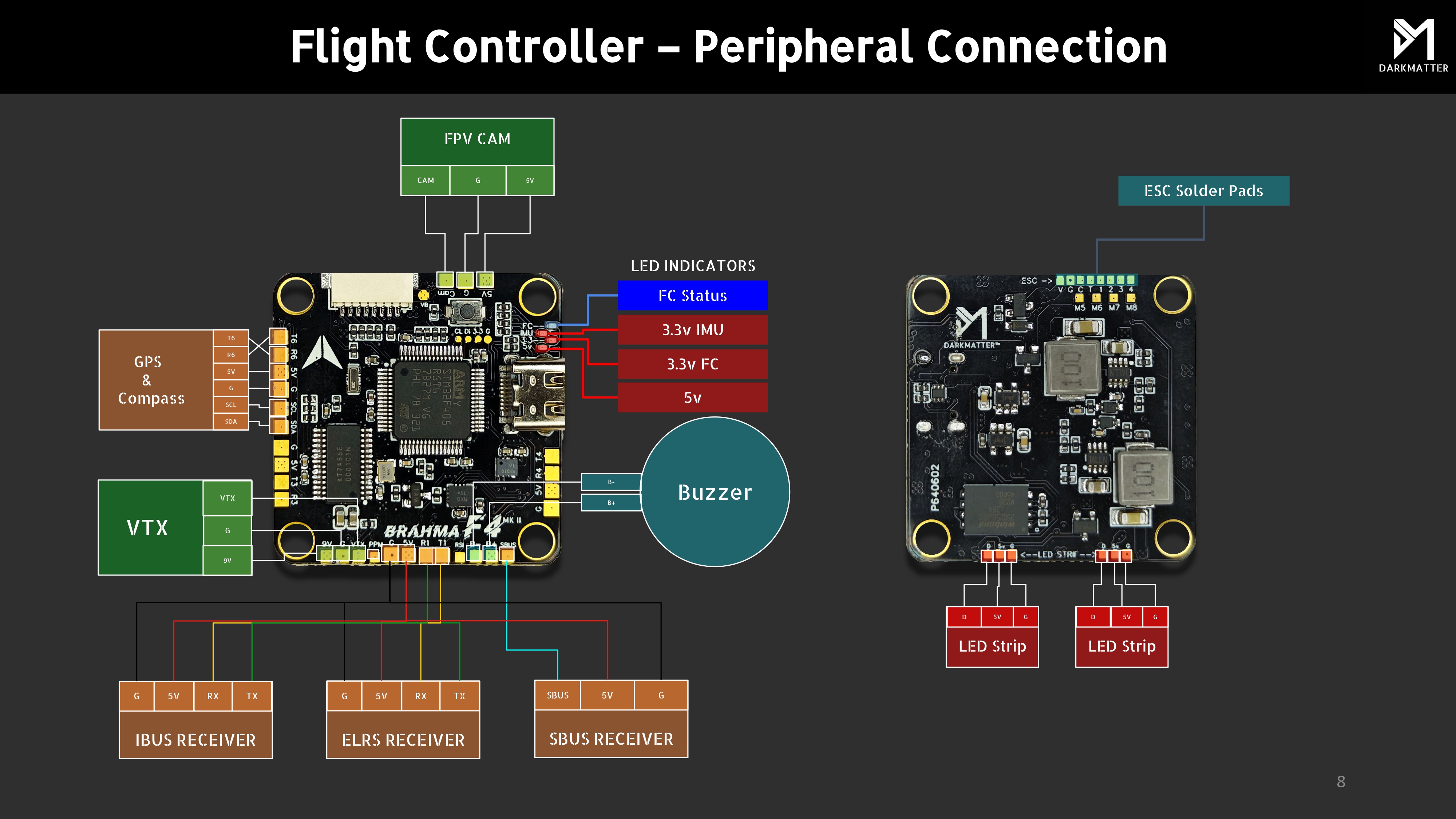
Pinout¶
UART Mapping¶
The UARTs are marked Rx and Tx in the above pinouts.
Name |
Pad |
Port |
Default Protocol |
|---|---|---|---|
SERIAL 0 |
DM/DP |
USB |
Mavlink2 |
SERIAL 1 |
RX1/TX1 |
USART 1 |
RCin (DMA capable) |
SERIAL 2 |
RX3/TX3 |
USART 3 |
ESC (T3 pin also on ESC connector) |
SERIAL 3 |
RX6/TX6 |
USART 6 |
GPS1 (DMAcapable) |
SERIAL 4 |
RX4/TX4 |
USART 4 |
MSP DisplayPort |
ESC Telemetry needs to be manually configured based upon esc used.
RC Input¶
RC input is configured by default on the R1 and T1 (UART1) pads (CRSF or ELRS). The SBUS pad is inverted and applied to R1.
PPM is not supported.
FPort requires connection to T1 and SERIAL1_OPTIONS be set to “7”.
CRSF also requires a T1 connection, in addition to R1, and automatically provides telemetry. Set SERIAL1_OPTIONS to “0”.
SRXL2 requires a connection to T1 and automatically provides telemetry. Set SERIAL1_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
OSD¶
Use of internal MAX7456 for analog OSD/VTX is enabled by default.
Simultaneous HD VTX OSD supportcan is configured on UART4 (DisplayPort).
PWM Outputs¶
The autopilot supports up to 9 PWM outputs (PWM 9 is defaulted to serial LED support). Outputs 1-4 are available via a standard ESC JST-SH connector and solder pads for M5-M8. All outputs support all PWM types. PWM 1-4 and 6-9 support DShot. PWM 1-4 support bi-directional dshot.
The PWM is in 5 groups:
PWM 1,2 in group1
PWM 3,4 in group2
PWM 5 in group3
PWM 6,7 in group4
PWM 8,9 in group5
Pads for Outputs 1-8 are available on bottom side of pcb
ESC port is a jst-sh V-G-C-R3-1-2-3-4
Channels within the same group need to use the same output rate. All channels in specific Timer groups are configured either as DSHOT or PWM, mixing of protocols within groups is not possible. Channel 9 is configured as NeoPixel by default but can be configured for and extra PWM output. PWM 8 cannot be used for DShot if PWM 9 is configured for NeoPixel.
Battery Monitoring¶
The board has a builtin voltage sensor and pin on ESC connector for external current sensor. Voltage sensor supports up to 6S LiPo.
The default battery configuration is:
BATT_MONITOR = 4
BATT_VOLT_PIN = 14
BATT_CURR_PIN = 11 (CURR pin)
BATT_VOLT_MULT = 13
BATT_AMP_PERVLT = 37
Compass¶
The autopilot does not have a built-in compass, however you can attach an external compass using I2C on the SDA and SCL pads.
Firmware¶¶
Firmware for this board can be found here in sub-folders labeled “BrahmaF4”.
Loading Firmware¶¶
Initial firmware load can be done with DFU by plugging in USB with the bootloader button pressed. Then you should load the “with_bl.hex” firmware, using your favourite DFU loading tool.
Once the initial firmware is loaded you can update the firmware using any ArduPilot ground station software. Later updates should be done with the *.apj firmware files.