Mission Planner Home¶
The Mission Planner, created by Michael Oborne, does a lot more than its name. Here are some of the features:
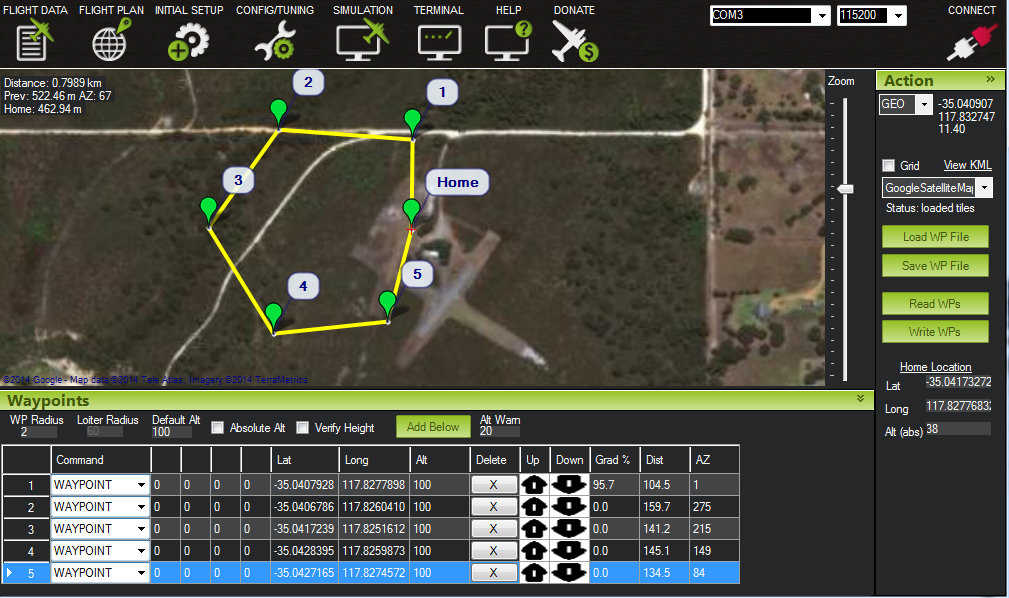
Point-and-click waypoint/fence/rally point entry, using Google Maps/Bing/Open street maps/Custom WMS.
Select mission commands from drop-down menus
Download mission log files and analyze them
Configure autopilot settings for your vehicle
Interface with a PC flight simulator to create a full software-in-the-loop (SITL) UAV simulator.
Run its own SITL simulation of many frames types for all the ArduPilot vehicles.
Please use the sidebar menus for instructions and more information.