Moving Map¶
module load map
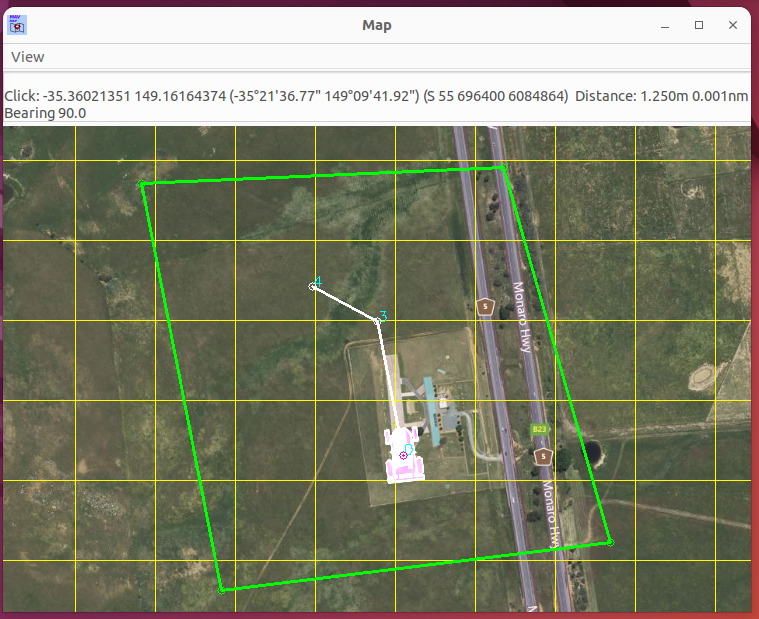
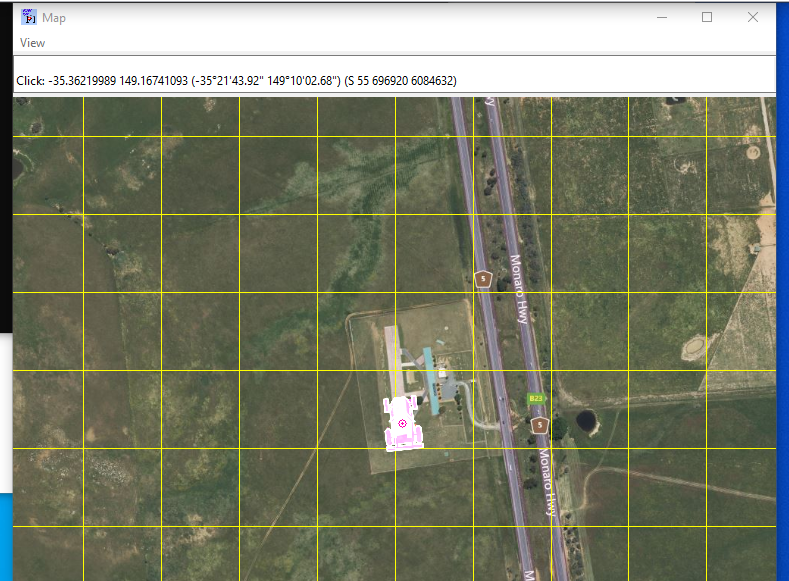
A moving map display that shows the UAV’s current position, waypoints and geofence.
Maps are automatically downloaded and cached to the user’s hard drive. The module will use these files if an internet connection is not found.
To display the waypoints and geofence, the wp list and
fence list commands can be used.
Waypoint editing is allowing by right-clicking to select waypoint and then right clicking to move it to that point.
To draw a set of waypoints, use the wp draw command. Right click on
the map for the desired waypoints. When finished, use the wp loop to
connect the last waypoint to the first one, creating a loop.
Use the “g” key to specify a position to move the map to.
The map has the following settings, which via be set via map set.
Setting |
Description |
Default |
|---|---|---|
showgpspos |
Show position according to GPS1 |
0 |
showgps2pos |
Show position according to GPS2 |
1 |
showsimpos |
If running in SITL, show the simulated position |
0 |
showahrs2pos |
Show AHRS2 position solution |
0 |
showahrs3pos |
Show AHRS2 position solution |
0 |
brightness |
Set map brightness |
1 |
rallycircle |
Show loiter circles around rally points |
False |
loitercircle |
Show loiter circles around loiter waypoints |
False |
showdirection |
Enable arrow to show mission direction |
False |