Fake GPS¶
module load fakegps
This allows MAVProxy to substitute a fakegps signal into the autopilot or simulation. This provides an easy means to simulate a given location and/or altitude to the autopilot/sim for testing features like terrain altitude, etc. while still on the bench.
In order to use it after the module is loaded, you must change GPS1_TYPE to “14” (MAVLink) so that GPS data is supplied via MAVLink commands.
Note
Autopilots with less than 2MB of flash do not have the MAVLink type GPS backend compiled in by default. Use the custom build server to create a firmware that does in order to use this module.
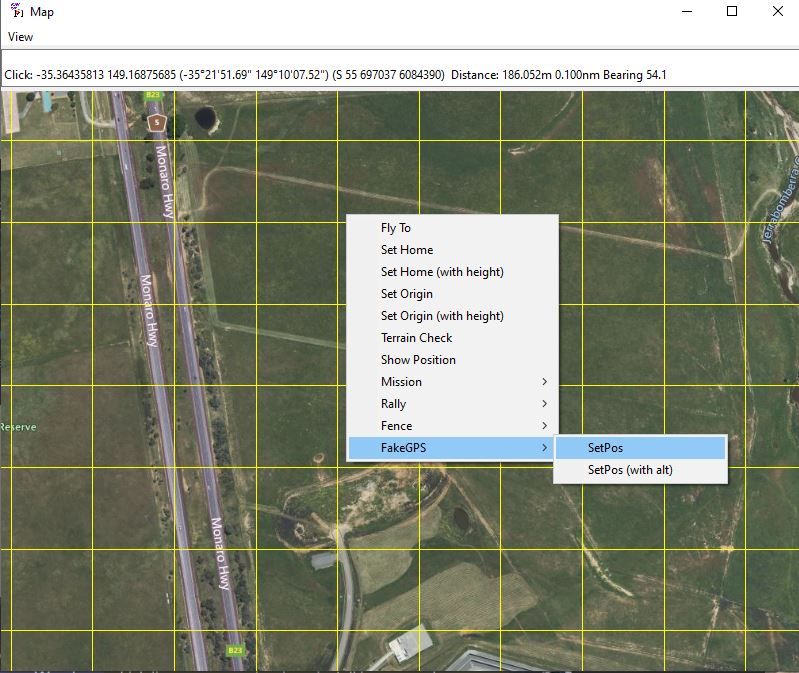
Then you can right click on any location and see the dropdown options for setting the new location and altitude:
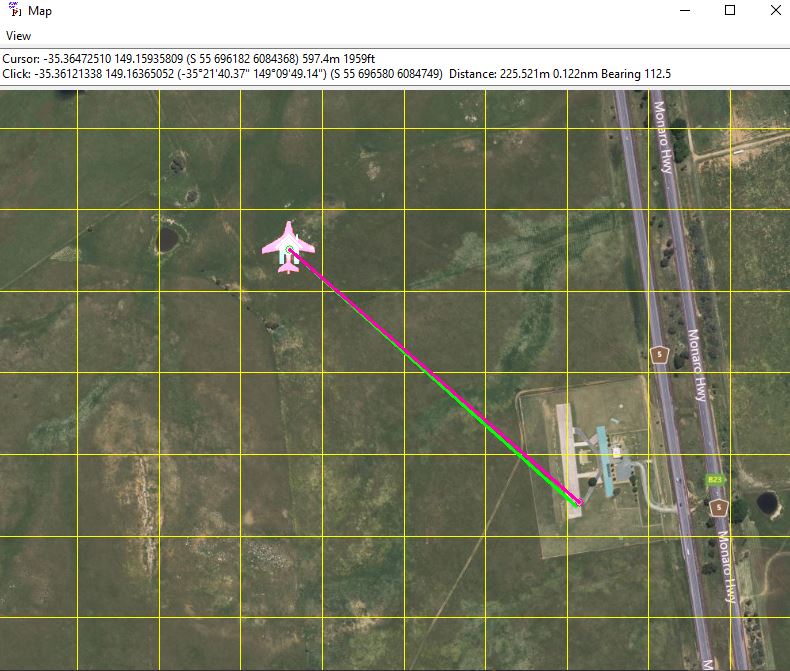
resulting it the location moving (there will be a 10 second delay while EKF re-aligns):