Rover SITL/MAVProxy Tutorial¶
This tutorial provides a basic walk-through of how to use SITL and MAVProxy for Rover testing.
Overview¶
Rover is an easy platform to get started with. Unlike Copter or Plane there are no fast-moving propellers, so there is no need to arm motors. As movement is along the ground, there is no need to consider taking off or landing, and pausing/loitering/waiting is just “stopping”. At the end of initialization the Rover is ready to go!
The article is intended primarily for developers who want to test new Rover builds and bug fixes using SITL and MAVProxy. It shows how to use the different modes, run missions, set a geofence, and perform a number of other basic testing tasks.
The tutorial is complementary to the topic Using SITL for ArduPilot Testing.
Note
We use MAVProxy here, but you can attach another ground station to SITL if you prefer (similar instructions can be used in any GCS).
This tutorial is for Rover - see Copter and Plane for similar tutorials on the other vehicles.
Preconditions¶
The tutorial assumes you have already set up SITL on Windows or
Linux and that you have started SITL
using the --map and --console options:
cd ~/ardupilot/Rover
sim_vehicle.py --map --console
Arrange the MAVProxy Command Prompt, Console and Map conveniently so you can observe the status and send commands at the same time.
Starting¶
Change the rover into Guided mode and then arm it by entering the following on the mavproxy console
GUIDED
arm throttle
Right-click on the map at your target destination, select Fly to, and enter an altitude (which is ignored). Rover should drive to the location, and then pause (still in Guided mode).
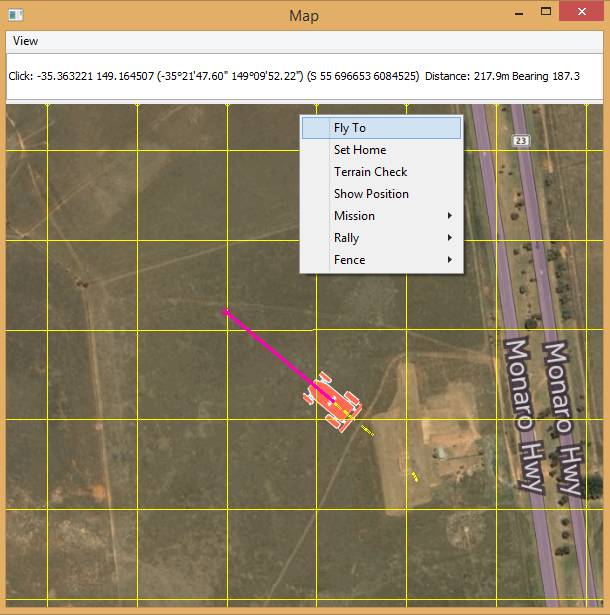
MAVProxy: Rover go tolocation¶
If you have a mission loaded, you can also simply change to AUTO mode to run it:
mode auto
Tip
Any commands or parameters that are not relevant to a Rover are ignored (e.g. TAKEOFF command and any altitude information).
Guiding the vehicle¶
The previous section covered almost everything you need to know about
moving the vehicle around the map in GUIDED mode.
You can also enter the target position manually on the command line using the two formats below. If only the altitude is specified, the last specified LAT/LON will be used.
guided ALTITUDE
guided LAT LON ALTITUDE
Just specifying the altitude (as 0) is useful if you need to pause then restart a guided path. The commands below set the mode to HOLD and then restart the vehicle travelling towards the previous point:
GUIDED> mode hold
HOLD> guided 0
GUIDED>
When you’re finished you can return to the initial position by changing
to RTL mode (this also works in AUTO mode):
GUIDED> mode rtl
RLT>
Running a mission¶
You can load a mission at any time using the wp load command. After
you’ve taken off the current mission will start as soon as you change to
AUTO mode.
The example below shows how to load and start one of the test missions, skip to the second waypoint, and loop the mission:
wp load ..\Tools\autotest\Generic_Missions\CMAC-circuit.txt
mode auto
wp set 2
wp loop
Note
Rover will only run commands it supports (others are ignored).
The MAVProxy Waypoints documentation lists the full set of available commands (or you can get them using auto-completion by typing “wp” on the command line).
If you want to create a waypoint mission, this is most easily done on the map:
Right-click on the map and then select Mission | Draw.
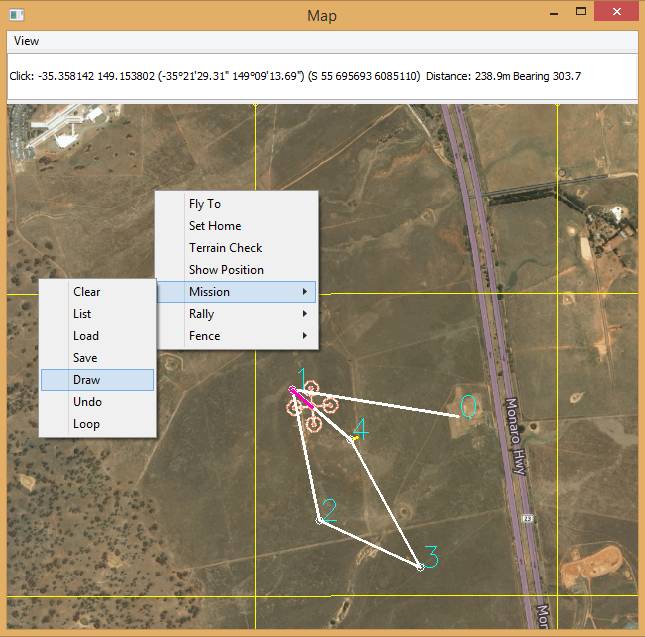
MAVProxy: Draw Mission Menu (This image is for Copter, but the behaviour is the same).¶
Left-click on the map where you want the points to appear.
Note
Nothing visible will happen when you make the first click. After the second click, lines will join your points to show the path
When you’re done, you can loop the mission by right-clicking on the map and selecting Mission | Loop.
This approach only allows you to create
MAV_CMD_NAV_WAYPOINT
commands. You can edit missions and use other commands on Linux using
the misseditor module (module load misseditor). This is currently
broken on Windows. It is also possible to load other types of commands
from files.
Tip
At any point you can pause the mission by setting the mode to
HOLD, and restart by setting it back to AUTO.
Changing mode¶
Rover supports a small number of modes which you can list in MAVProxy
with the mode command:
GUIDED> mode
GUIDED> ('Available modes: ', ['AUTO', 'GUIDED', 'MANUAL', 'LEARNING', 'RTL', 'INITIALISING', 'HOLD', 'STEERING'])
The useful modes for simulation are:
AUTO- Run a missionGUIDED- Move where directed by GCSRTL- Return to launchHOLD- WAIT - pause mission/stop moving.
As shown in the previous section, you can change the mode by specifying
mode modename. Most of the modes can be set by just entering the
mode name, e.g. rtl, auto, hold.
Testing the vehicle¶
MAVProxy allows you to list all the parameters affecting the vehicle
and simulation using param show *, and to set any parameter using:
param set PARAM_NAME VALUE. In addition to affecting the vehicle
itself some parameters simulate the performance/failure of specific
hardware components and the environment (for example, the wind). These
can be listed using:
.. code-block:: console
param show sim*
The topic Using SITL for ArduPilot Testing <using-sitl-for-ardupilot-testing> explains more about how you can test using SITL.