Autotest Framework¶
ArduPilot’s AutoTest suite allows for the creation of repeatable tests which help prevent regressions in ArduPilot’s behavior. It is based on ArduPilot’s SITL architecture - i.e. a fully-software-based solution.
Using ArduPilot’s AutoTest can:
make your development process more efficient by reducing time spent repeatedly running the same scenario in
sim_vehicle.pyallow you to repeatedly replicate bad behavior in ArduPilot, and possibly ship that test to a developer capable of fixing the issue (“test-driven-development”)
reduce the chances of a regression in ArduPilot’s behavior by locking in tests for that behavior
Overview¶
The AutoTest suite is run on ArduPilot’s autotest server on most commits to the master branch but can be run locally to vet software changes. Adding tests is straightforward and encouraged to show how patches improve flight behavior.
Running AutoTest¶
Warning
Don’t run autotest.py with no parameters - unless you know what you are doing or like cleaning up large messes.
AutoTest requires a valid SITL environment to run. Use the SITL instructions (SITL) to obtain a valid environment. It is suggested the ArduPilot Vagrant virtual machine configuration files be used to obtain a working environment.
Invocation¶
Note
running autotest with high-levels of --speedup can result in enough network traffic that MAVProxy can’t keep up. An error such as “Set RC override timeout” or the vehicle entering GCS failsafe are typical of these failures. Re-running will often allow the tests to pass. Reducing the --speedup factor is typically sufficient to avoid this problem.
Help is available:
pbarker@bluebottle:~/rc/ardupilot(master)$ ./Tools/autotest/autotest.py --helpUsage: autotest
Options:
-h, --help show this help message and exit
--skip=SKIP list of steps to skip (comma separated)
--list list the available steps
--viewerip=VIEWERIP IP address to send MAVLink and fg packets to
--map show map
--experimental enable experimental tests
--timeout=TIMEOUT maximum runtime in seconds
--frame=FRAME specify frame type
--show-test-timings show how long each test took to run
Build options:
--no-configure do not configure before building
--waf-configure-args=WAF_CONFIGURE_ARGS
extra arguments passed to waf in configure
-j J build CPUs
--no-clean do not clean before building
--debug make built binaries debug binaries
Simulation options:
--speedup=SPEEDUP speedup to run the simulations at
--valgrind run ArduPilot binaries under valgrind
--gdb run ArduPilot binaries under gdb
--gdbserver run ArduPilot binaries under gdbserver
-B BREAKPOINT, --breakpoint=BREAKPOINT
add a breakpoint at given location in debugger
pbarker@bluebottle:~/rc/ardupilot(master)$
autotest.py is invoked with a sequence of “steps” which will be executed in order:
./Tools/autotest/autotest.py build.Copter test.Copter
This command is valid in the root directory of an ArduPilot checkout. It instructs AutoTest to build the ArduCopter SITL binary, start that binary, test it and then kill it. The output (sample) is extremely verbose, but a summary is given once all steps have been run.
Note
Older versions of autotest.py used these steps:
build.ArduPlane build.ArduCopter build.APMrover2 build.ArduSub build.AntennaTracker fly.ArduCopter fly.ArduPlane fly.QuadPlane dive.ArduSub drive.APMrover2 drive.BalanceBot drive.balancebot fly.CopterAVC
Note
--list : list available steps (build, test, defaults, examples)
Note
The --no-clean option can greatly reduce your development-cycle-time
Note
When developing tests, consider omitting the “build” step - unless you are changing ArduPilot code.
Complex Invocation¶
./Tools/autotest/autotest.py --no-clean build.Copter test.Copter build.Rover test.Rover test.Balancebot build.Plane test.Plane test.QuadPlane build.Sub test.Sub build.Helicopter test.Helicopter build.Tracker test.Tracker
At the time of writing, these invoke all the vehicle tests. Expect these to take about 40 minutes to run.
Running a specific sub-test¶
To run a specific sub-test just add the test name with a ‘.’ between the test and sub-test names.
./Tools/autotest/autotest.py build.Plane test.Plane.ThrottleFailsafe
Using with GDB¶
AutoTest can run the ArduPilot binary under gdb:
./Tools/autotest/autotest.py --no-clean --gdb --debug build.Copter test.Copter
In an X Windowing System environment, an xterm window will contain the GDB terminal; stderr from the ArduPilot binary will also appear in this window. Where X is not available but GNU screen is, a detached screen will be created with the same content.
You can insert breakpoints on the command-line (use multiple times to insert multiple breakpoints):
./Tools/autotest/autotest.py --no-clean --gdb --debug -B Copter::update build.Copter test.Copter
You can insert a Python method call into your test to cause the autopilot to enter the attached debugger:
self.send_debug_trap()
This feature works well when combined with the --disable-breakpoints command-line option as you can enable the breakpoints when the debug trap is sent.
Using with Valgrind¶
AutoTest can run the ArduPilot binary under the Valgrind memcheck tool. This is useful for finding the reading of uninitialised memory and the like.
Warning
ArduPilot initializes most of its dynamically-allocated memory to zero by overriding the new function. Some versions of Valgrind do not understand this. The supplied xenial32 Vagrant virtual machine contains a version of Valgrind which does not suffer from this issue.
./Tools/autotest/autotest.py --no-clean --valgrind --debug build.Rover test.Rover
Special log files (e.g. arducopter-+-valgrind.log) are created by autotest when run with this tool. They should always be empty at the end of an autotest run.
Extracting Results¶
After AutoTest has run, several log files are available.
The log on autotest.py’s stdout is obvious!
DataFlash files are available in the “logs” directory:
pbarker@bluebottle:~/rc/ardupilot(master)$ ls -lt logs
total 21356
-rw-r--r-- 1 pbarker pbarker 8474624 Jul 27 12:07 00000003.BIN
-rw-r--r-- 1 pbarker pbarker 3 Jul 27 12:06 LASTLOG.TXT
-rw-r--r-- 1 pbarker pbarker 13307904 Jul 27 12:06 00000002.BIN
-rw-r--r-- 1 pbarker pbarker 73728 Jul 27 12:05 00000001.BIN
pbarker@bluebottle:~/rc/ardupilot(master)$
The MAVLink telemetry logs are present in the “buildlogs” directory. This directory is typically created one-level-higher than the ArduPilot root directory.
pbarker@bluebottle:~/rc/ardupilot(master)$ ls -l ../buildlogs/*tlog
-rw-r--r-- 2 pbarker pbarker 2541216 Jul 27 12:11 ../buildlogs/Rover-test.tlog
pbarker@bluebottle:~/rc/ardupilot(master)$
Note
On the Vagrant virtual machine, the ArduPilot root directory is mounted on /vagrant. The “vagrant” user has no permission to create the “buildlogs” directory in “/”, so instead, the buildlogs directory appears at /tmp/buildlogs
Warning
Not all MAVLink traffic involved in the testing is present in the buildlogs tlog file. Only traffic to/from MAVProxy itself (as opposed to additional MAVProxy –outputs) is present. See AutoTest Structure for more information.
Correlation of Output Files with the autotest server¶
ArduPilot’s autotest server displays the results of the most recent AutoTest run. If a test is failing on the autotest server, it should be possible to replicate that failure locally using autotest.py
AutoTest’s “Test Results” section reflects autotest.py’s return value for each of the steps.
AutoTest’s “Test Logs” section reflects the contents of the buildlogs directory.
AutoTest’s “Flight Tracks” section’s images can be created using the “convertgpx” step.
AutoTest Structure¶
File Structure¶
- Tools/autotest/autotest.py
the main entry point to the autotest suite
- Tools/autotest/antennatracker.py
contains tests for AntennaTracker
- Tools/autotest/arducopter.py
contains tests for ArduCopter in both multicopter and helicopter form
- Tools/autotest/rover.py
contains tests for ArduRover
- Tools/autotest/ardusub.py
contains tests for ArduSub
- Tools/autotest/arduplane.py
contains tests for ArduPlane
- Tools/autotest/balancebot.py
contains tests for Balance Bots/Self Balancing Robots
- Tools/autotest/quadplane.py
contains tests for ArduPlane’s QuadPlane code
- Tools/autotest/pysim/util.py
various utility functions used by AutoTest
- Tools/autotest/vehicle_test_suite.py
Contains a base class inherited by the per-vehicle testing routines
Network Structure¶
The AutoTest network plumbing is complicated.
From a test’s perspective:
- self.mavproxy
An pexpect object used to interact with the MAVProxy process. All MAVProxy commands are valid when sent to this object - e.g.
set shownoise 0. This is not always available - self.start_mavproxy() and self.stop_mavproxy() should be used by a test if it requires MAVProxy.- self.mav
A mavudp object connected to a the primary output port of the simulation (usually TCP port 5760).
- self.mav.mav
The mavudp’s MAVLink object. Can be used to send messages via MAVLink to the SITL binary:
self.mav.mav.system_time_send(time.time() * 1000000, 0)
RC Overrides¶
A test’s call to self.set_rc(ch, value) effectively sets the RC
inputs for the simulated vehicle. It is important to note that these
are not “RC overrides” - it is “real” simulated RC input. The SITL
binary listens on a network port for packets of 8-bit or 16-bit quantities
representing the RC input. MAVProxy is invoked in such a way that
data which it would otherwise have sent as MAVLink RC override
packets are delivered to that network socket instead.
Adding a Test¶
Note
The autotest script is in flux. This documentation may be out of date.
This git commit is a reasonable example of adding an entirely new test to the ArduPilot suite.
AutoTest Tests contains some more detailed information on writing tests.
Conducting an automated git bisect with an autotest¶
Tools/autotest/bisect-helper.py can be used as the script argument to git bisect run. It can run an autotest test - by name - and tell you which commit broke that test.
To accomplish this:
make sure you’re not already running a bisect -
git bisect resetcreate a topic branch for your new test (based on master) which fails now but you know would have passed at some stage in the past
write your test - which should fail on your topic branch, and commit it
you can test your branch by creating a branch at some stage in the past and cherry-picking your test into that branch. This may not be trivial depending on what changes have been made in the autotest framework
cp Tools/autotest/bisect-helper.py /tmp# always use modern helper
git bisect reset
git bisect start
git bisect bad- we know the test fails where it was written
git bisect good HEAD~1024- this is where we know the test passes
time git bisect run /tmp/bisect-helper.py --autotest --autotest-vehicle=Plane --autotest-test=NeedEKFToArm --autotest-branch=wip/bisection-using-named-test
In the last command, you need to specify the vehicle, new test name, and the name of the topic branch which contains your new test.
After this has run you should know which commit broke the functionality being tested. And you also have a new test for the regression suite which you should PR!
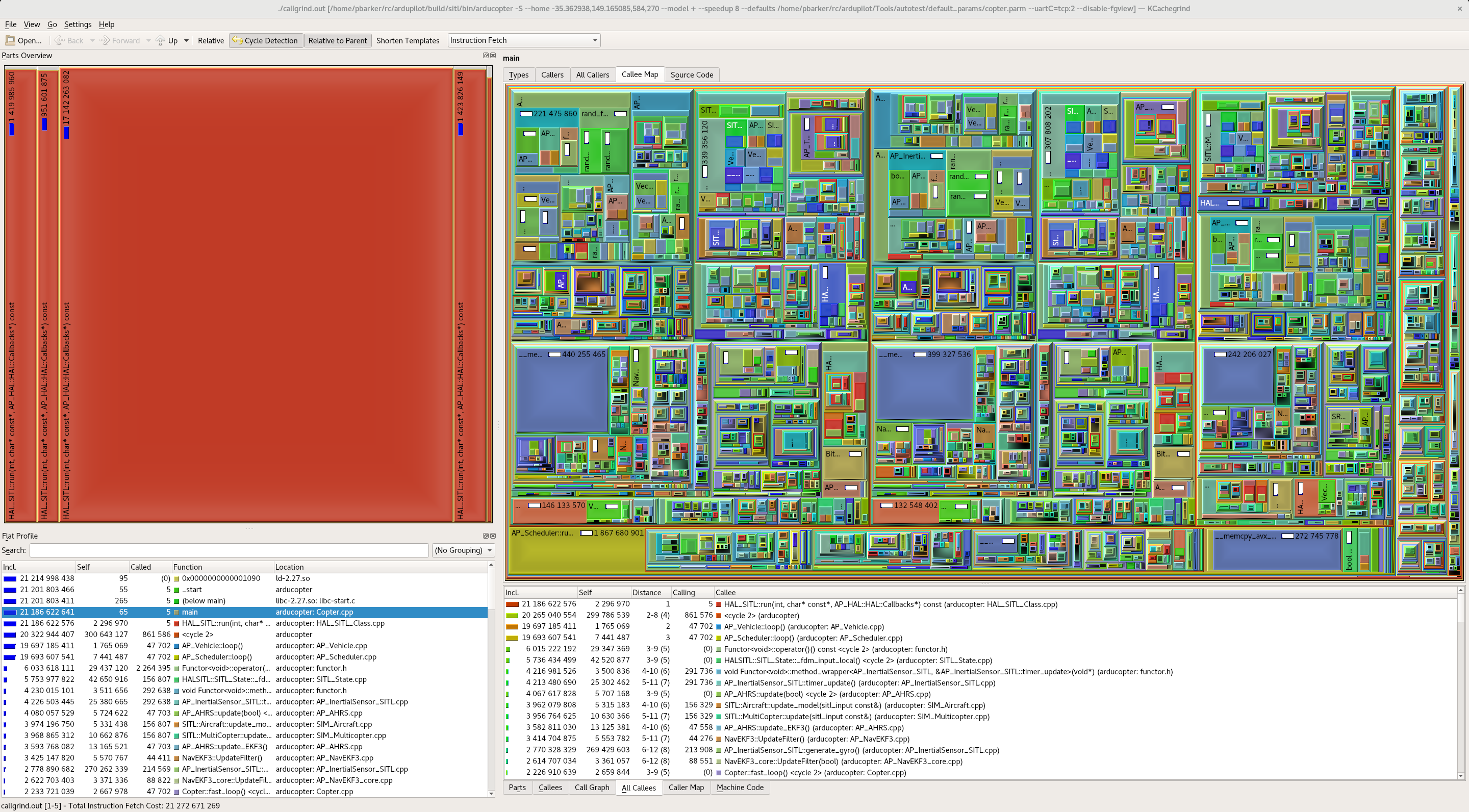
Using with callgrind / kcachegrind¶
Valgrind is actually a collection of tools - mostly it is used with the “memcheck” tool to find memory read/write problems.
Valgrind’s callgrind tool allows for performance analysis. autotest.py has built-in support for running ArduPilot under callgrind.
pbarker@bluebottle:~/rc/ardupilot(tmp/kcachegrind)$ ./Tools/autotest/autotest.py build.Copter
lckfile='/home/pbarker/rc/buildlogs/autotest.lck'
step=build.Copter
Running: ("git rev-parse HEAD") in (/home/pbarker/rc/ardupilot)
.
.
bin/arducopter 4795907 173448 172104 5141459
Build commands will be stored in build/sitl/compile_commands.json
'build' finished successfully (15.974s)
pbarker@bluebottle:~/rc/ardupilot(tmp/kcachegrind)$ rm callgrind.out.*
pbarker@bluebottle:~/rc/ardupilot(tmp/kcachegrind)$ ./Tools/autotest/autotest.py --callgrind test.Copter.Callisto
lckfile='/home/pbarker/rc/buildlogs/autotest.lck'
step=test.Copter.Callisto
Running: ("git rev-parse HEAD") in (/home/pbarker/rc/ardupilot)
.
.
AT-0368.6: Stopping SITL
>>>> PASSED STEP: test.Copter.Callisto at Tue Nov 30 08:55:20 2021
pbarker@bluebottle:~/rc/ardupilot(tmp/kcachegrind)$ kcachegrind