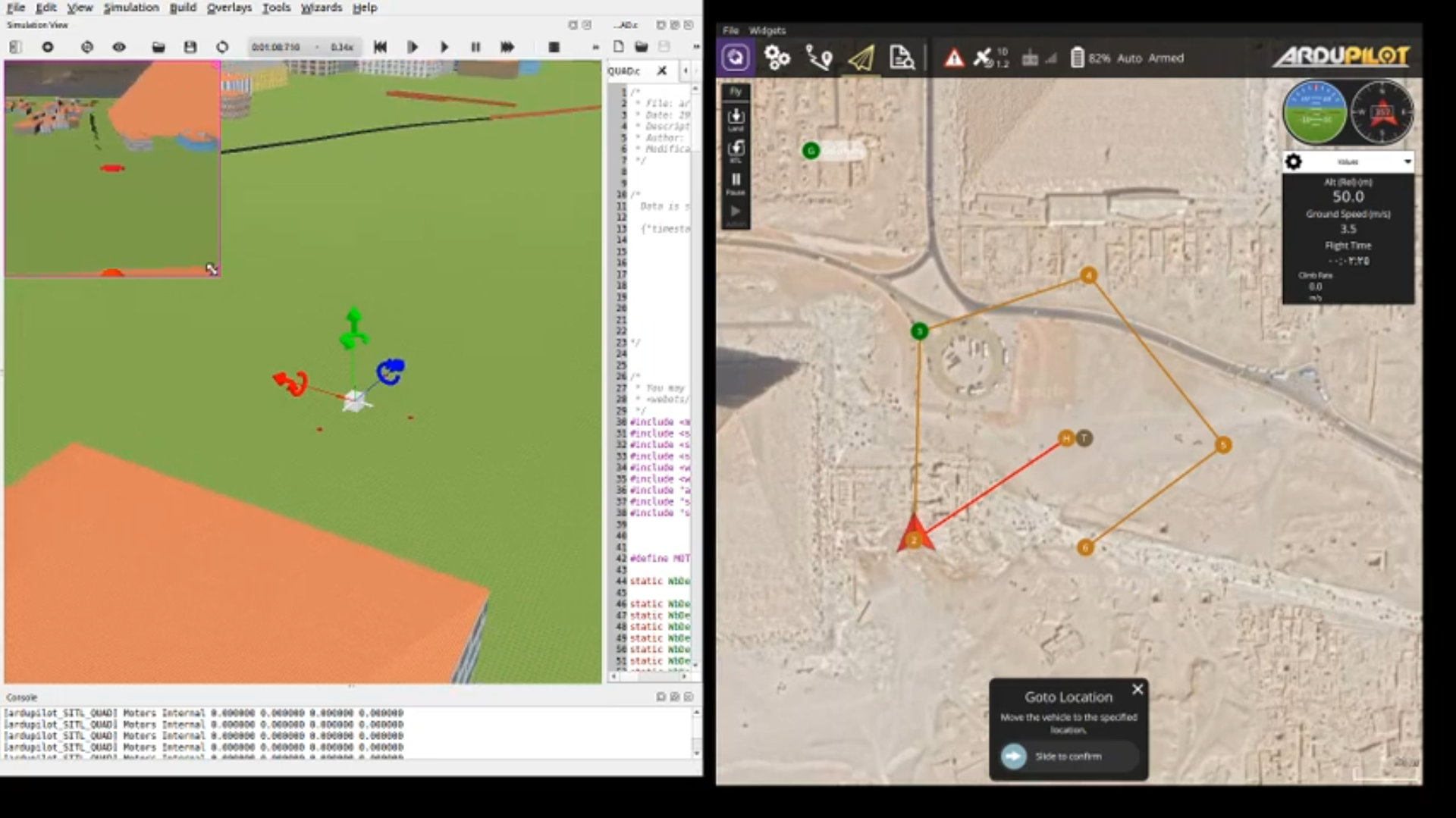
SITL with Webots¶
Webots is a multi-platform robotics simulator that has been in development since 1998 and is designed for professional use. ArduPilot has both Multirotor and Rover examples and supports the creation of new vehicles and worlds. As of writing, there is no fixed-wing support as it will require a custom physics plugin to simulate lift.
Currently, there are two ArduPilot Webots robot controller implementations: a python-based controller and a C-based controller.
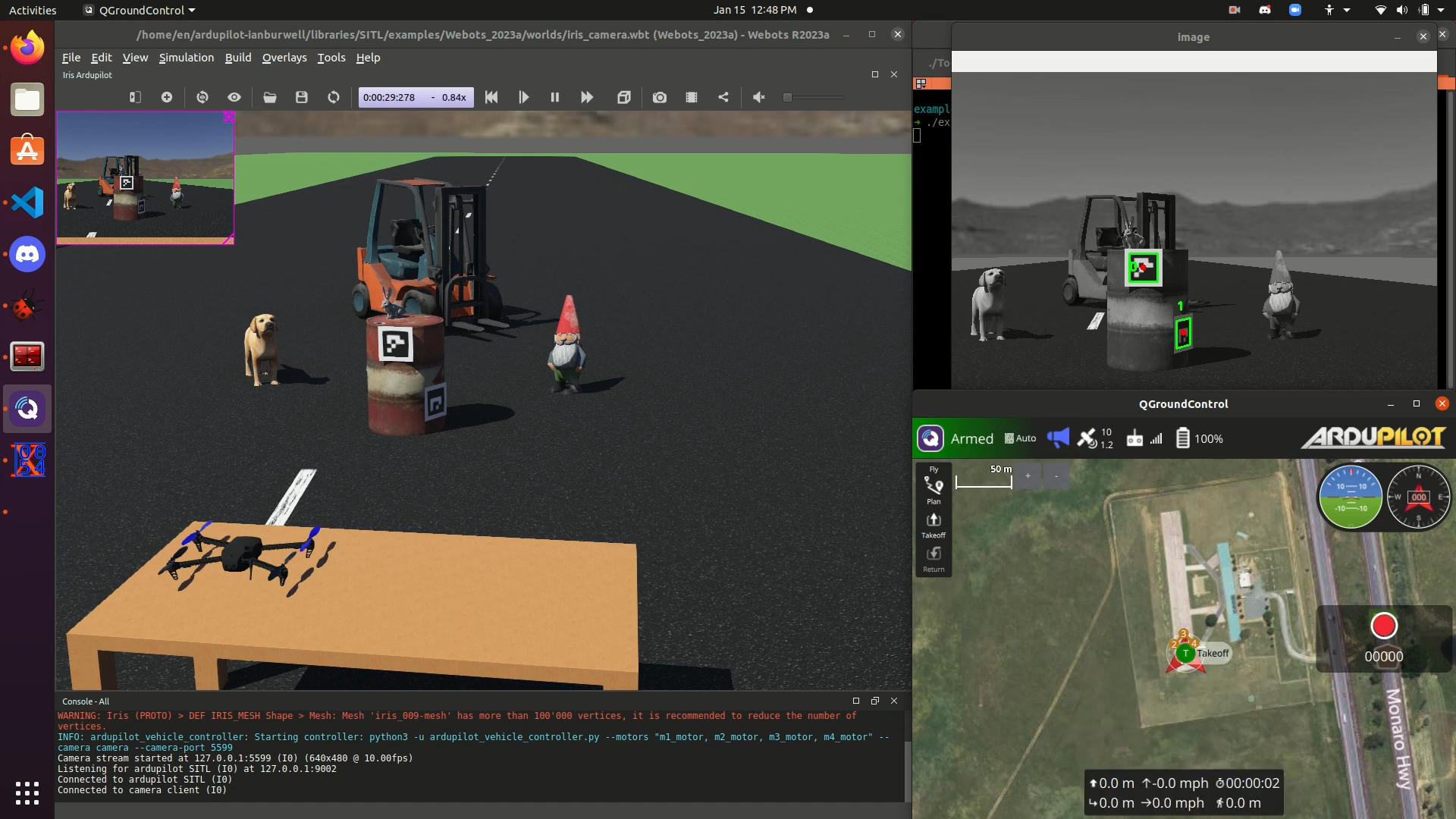
Webots Python¶
The Webots python controller is the newer implementation of the two options and supports the newest Webots versions (2023a and onwards). It was designed to run without compilation on all operating systems while providing an easy way to create custom vehicles and worlds.
Webots C¶
The Webots C controller was the first Webots implementation in ArduPilot and supports Webots 2021b. This implementation also includes wind simulation through a custom physics plugin.