Using last_letter as an External SITL Simulator¶
This article explains how to run SITL for Plane using last_letter as the flight simulation engine (instead of JSBSim).
Note
Currently the last_letter simulator is in early development stage and also only supports fixed-wing aircraft. Expect frequent updates and changes in its architecture. Up-to-date documentation on last_letter is always found at its Github page.
Overview¶
Currently, the default simulation software for Plane SITL is JSBSim. While this is a renowned simulation solution for fixed-wing aircraft, it is primarily targeted towards full-scale vehicles and focuses on relevant features such as fuel management, variable pitch drives and oleos. After many years of life it is difficult to modify to cater for UAV-specific applications. Moreover it is paired with FlightGear as the visualizer, which is a quite a demanding piece of software in terms of system resources.
In contrast, during the development of a robotic platform it is often more important to have easy access to the system states, be able to change simulator components easily, add new subsystems, and interface with other packages.
The Robotics Operating System (ROS) framework is a potential answer to this need. It is a software framework which resides on top of the operating system, orchestrating the execution of multiple programs and the communication between them. It provides the tools to compile programs written in C++ and Python and monitor their execution. It is specifically targeted for development of modular robotics applications by providing standardized message headers, universally useful system tools, logging capabilities, execution across multiple machines and most importantly a large codebase of user-submitted, stand-alone packages, fit for diverse applications.
last_letter is a flight simulator written mostly in C++ under the ROS framework. It incorporates a modular description of the airplane model, modeling aerodynamics, propeller and motor dynamics, ground reactions, wind and gust disturbances and much more. Its structure allows for relatively easy coding of additional functions, and offers the potential for a unified simulator for all platforms, compatibility with other ROS packages and a modular, detailed simulation solution.
Preconditions¶
ROS version¶
Last_letter is being developed under ROS Indigo, and this is the only supported version.
Tip
Last_letter was originally developed under ROS Hydro, and no code changes were required during the transition. While ROS Hydro is no longer supported, developers that need to use last_letter on this version may find it still works.
Operating System requirements¶
The selected operating system must be compatible with ROS Indigo in order to run last_letter.
We recommend Ubuntu 14.04.2 as this is the platform used for developing last_letter and is also known to be compatible with SITL. Ubuntu Linux 13.10 and 14.04 are also supported by both ROS Indigo and SITL.
Installation¶
First install the Plane SITL on your Linux machine, as described Setting up SITL on Linux.
Like any other set of ROS packages, last_letter and its companion library packages last_letter_msgs, uav_utils, math_utils and rqt_dashboard require ROS to be present on your system. If you have previous experience with ROS and have it on your system, installation oflast_letter is as simple as cloning the package files in your workspace. If not, the following instructions will guide you through the process.
ROS installation¶
Follow the instructions on the ROS website to install ROS Indigo in your machine.
Workspace creation¶
After installing ROS you need to create a ROS Workspace. This is the directory where custom software packages (packages which are not part of the official ROS repository) are created, copied or edited. This is also where the ROS compiler (also known as catkin) looks for your code.
Follow these instructions to create your workspace.
They instruct you to create your workspace under your home folder, but
it can also be created elsewhere. Just be sure you have full rights to
this folder, so a subfolder in your home folder is a good choice. Make
sure $ROS_PACKAGE_PATH sees your catkin_ws/src folder.
Tip
You probably don’t want to source your workspace path every time you open a new console. To avoid this, add the following line to your /home/<username>/.bashrc file (assuming that you created your catkin workspace directly under your home folder).
source ~/catkin_ws/devel/setup.bash
Cloning the last_letter simulator files¶
Execute the following commands in your console to download and compile the simulator (without the comments):
roscd
cd ../src #Navigate in your ROS user source files directory
git clone https://github.com/Georacer/last_letter.git #Clone the simulator files
roscd
cd .. #Navigate in your ROS workspace
catkin_make #Compile the files
Compilation may take a while.
Testing everything is installed properly¶
In a console, run:
roslaunch last_letter launcher.launch
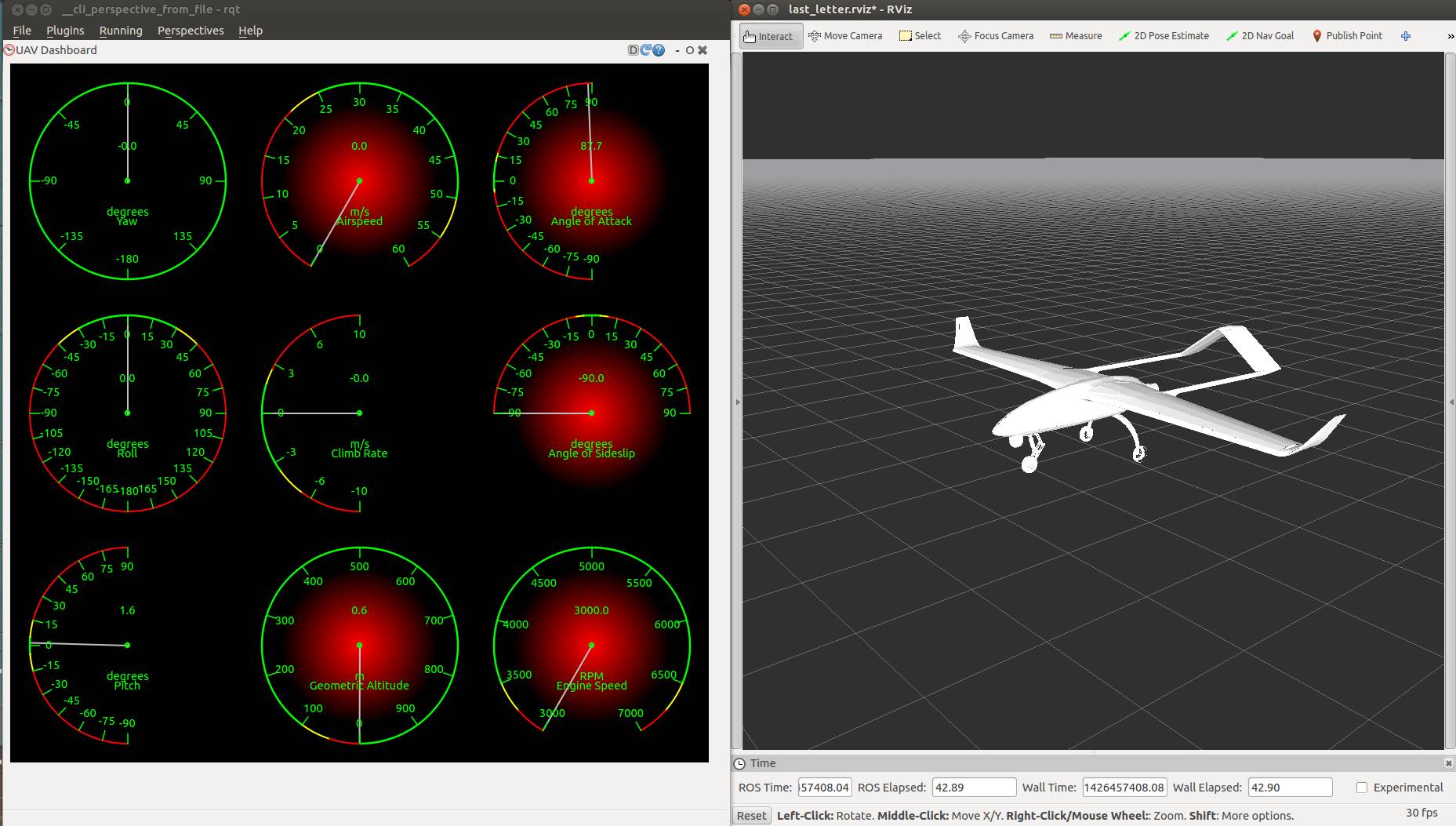
This should start the simulator and open a 3D simulation environment using an application called RViz. The rqt_gui application will start as well; this is where the avionics instruments are displayed.
If everything went smoothly, you can close everything and proceed to interface last_letter with Plane SITL.
Using last_letter as the physics simulator for SITL¶
Follow the Plane SITL instructions to
download and compile the Plane code. Make sure your local git branch is
checked out on master.
When everything is done, enter the Plane directory and start the SITL simulation:
cd ~/ardupilot/ArduPlane
sim_vehicle.py -f last_letter --console --map
This will run SITL, Plane, MAVProxy and last_letter along with RViz
all in one go (the RViz visualizer may take several seconds to start).
This procedure will automatically invoke the last_letter launch file
and set the Plane parameter to true so that the communication
nodes between last_letter and Plane are raised. If last_letter
communicates with Plane correctly, the MAVProxy console should display
3D satellite fix and track 10 satellites.
When you start sim_vehicle.py an xterm will be created which launches ArduPilot and last_letter. If you have troubles running the simulator then finding this (minimised) xterm and looking at the debug output there can be very helpful.
You can issue commands or RC overrides using MAVProxy as normal.
Missing features¶
At time of writing (17 March, 2015), last_letter does not support the common initialization arguments (such as starting location). Moreover, the MAVProxy commands which would control the JSBSim simulator (such as the wind and pause commands) are not supported.
Currently, the only way to select the aircraft and alter its initial states is by editing the parameter files of the simulator, as described in the corresponding manual page.
Running last_letter in a virtual machine¶
Last_letter has been successfully run within virtual machines using the configurations described in its compatibility information. To test the performance of the simulator in a particular environment, look at the xterm window assigned for the simulator output: There should be a framerate message, updating every 5 seconds.
Currently, Plane and SITL are set to run at a nominal 500Hz. A frequency of over 480Hz indicates that the simulator is running at an acceptable speed.