SITL Simulator (Software in the Loop)¶
The SITL (software in the loop) simulator allows you to run Plane, Copter or Rover without any hardware. It is a build of the autopilot code using an ordinary C++ compiler, giving you a native executable that allows you to test the behaviour of the code without hardware.
This article provides an overview of SITL’s benefits and architecture.
Overview¶
SITL allows you to run ArduPilot on your PC directly, without any special hardware. It takes advantage of the fact that ArduPilot is a portable autopilot that can run on a very wide variety of platforms. Your PC is just another platform that ArduPilot can be built and run on.
When running in SITL the sensor data comes from a flight dynamics model in a flight simulator. ArduPilot has a wide range of vehicle simulators built in, and can interface to several external simulators. This allows ArduPilot to be tested on a very wide variety of vehicle types. For example, SITL can simulate:
multi-rotor aircraft
fixed wing aircraft
ground vehicles
underwater vehicles
camera gimbals
antenna trackers
a wide variety of optional sensors, such as Lidars and optical flow sensors
Adding new simulated vehicle types or sensor types is straightforward.
A big advantage of ArduPilot on SITL is it gives you access to the full range of development tools available to desktop C++ development, such as interactive debuggers, static analyzers and dynamic analysis tools. This makes developing and testing new features in ArduPilot much simpler.
Running SITL¶
The ArduPilot SITL environment has been developed to run natively on both Linux and Windows. For setup instructions see Setting Up SITL for more information. Using SITL is explained in Using SITL. For examples of starting and using SITL for a particular vehicle see Examples of using SITL by Vehicle.
Mission Planner (Windows) also provides a simple means of running SITL for the master branch and stable branches of vehicles. See Mission Planner Simulation.
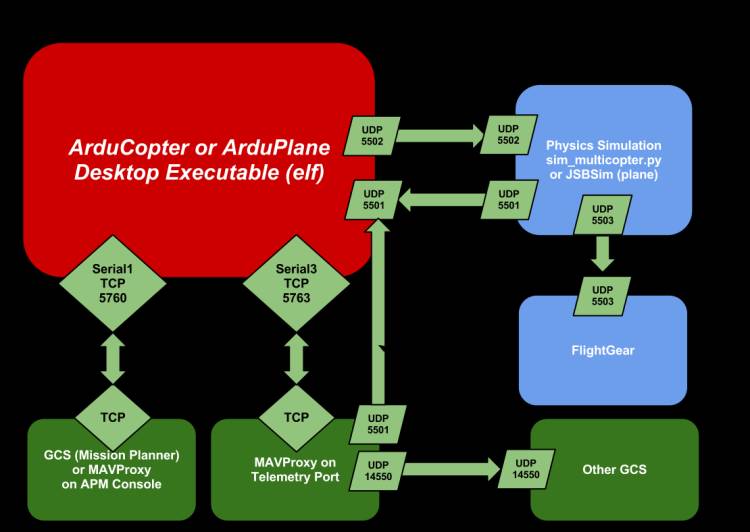
SITL Architecture¶
Note in the image below the port numbers are indicative only and can vary. For instance the ports between ArduPilot and the simulator on the image are 5501/5502 but they can vary to be 5504/5505 or other port numbers depending on your environment.