Partner Support Proxy¶
This page tells you how to take advantage of the ArduPilot MAVLink support proxy at support.ardupilot.org. You have likely been directed here by an ArduPilot support engineer who is wanting you to use the proxy to allow the support engineer to connect to your vehicle to assist you.
About the Support Proxy¶
The ArduPilot partner support proxy allows users vehicles running ArduPilot to connect to a support engineer. Key features:
uses MAVLink2 signing to maintain security
does not need a public IP address for either user or support engineer
Connecting to the Support Proxy¶
Your support engineer will have given you a number which you should use when connecting. It will be a 5 or 6 digit number. In the diagrams below we will use the example number ‘10001’. Please replace that with the number you have been told to use.
To get started, select the Support Proxy option under Setup->Advanced in MissionPlanner:
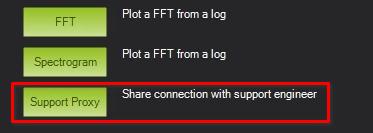
If you don’t see this option then you have an old version of MissionPlanner and should update to the latest release.
Next enter the 5 or 6 digit ID that your support engineer have you and press connect:
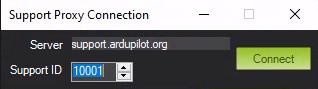
at this point you are streaming your mavlink data to the proxy server. The support person will be able to connect and help you. You can click the Stop button to stop forwarding your link.
Note
Please close MissionPlanner completely when you have finished with your support session to ensure the port is released.
Connecting with QGroundControl¶
To forward your connection to the support engineer from QGroundControl you need to use this configuration setting:
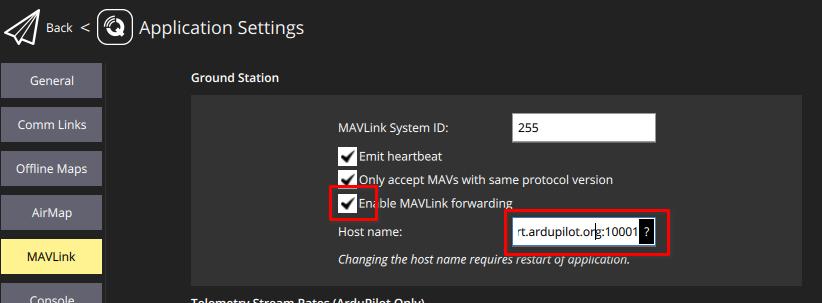
You need to put support.ardupilot.org:XXXXX where XXXXX is the support port number your support engineer has given you.
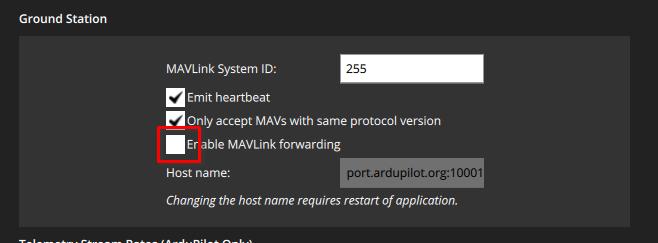
Note
Please remember to untick the “Enable MAVLink forwarding” option when your support session is completed!
Connecting With MavProxy¶
If you use mavproxy instead of MissionPlanner then you should add connect like this:
mavproxy.py --console --map --out support.ardupilot.org:10001
or instead you can do “output add support.ardupilot.org:10001” from an already connected session.
CAN Management¶
Note that as CAN packets can be forwarded over MAVLink you can configure DroneCAN devices remotely via the proxy. Use the MAVLink-CAN1 or MAVLink-CAN2 buttons in Setup->Optional Hardware->DroneCAN to start looking at the remote CAN bus.
The Support Proxy Dashboard¶
The proxy has a web dashboard at support.ardupilot.org/dashboard. As an ArduPilot user you do not normally need it. It is used by support engineers (and the partner organisation that gave you your connection number) to manage the connection: changing the MAVLink2 signing pass phrase, seeing who is currently connected, and optionally recording the telemetry of a support session for later analysis. If you have been given the pass phrase for your connection you can log in there with your connection number and pass phrase.