StellarF4 V2 Flight Controller¶
Stellar F4V2 is an autopilot by Stingbee.
Features¶
- Processor
STM32F405
- Sensors
ICM-42688p Acc/Gyro with external clock feature
DPS310/BMP280 barometer
AT7456E OSD
W25Q128 dataflash
- Power
2S-8S Lipo input voltage with voltage monitoring
12V, 3A BEC for powering Video Transmitter
5V, 2A BEC for internal and peripherals
- Interfaces
11x PWM outputs DShot capable, PWM1-4 DShot capable
4x UARTs
1x I2C
2x ADC
SPI flash for logging
USB-C port
- LED
Red, 3.3V power indicator
Green, FC status
- Size
41 x 41mm PCB with 30.5mm M3 mounting
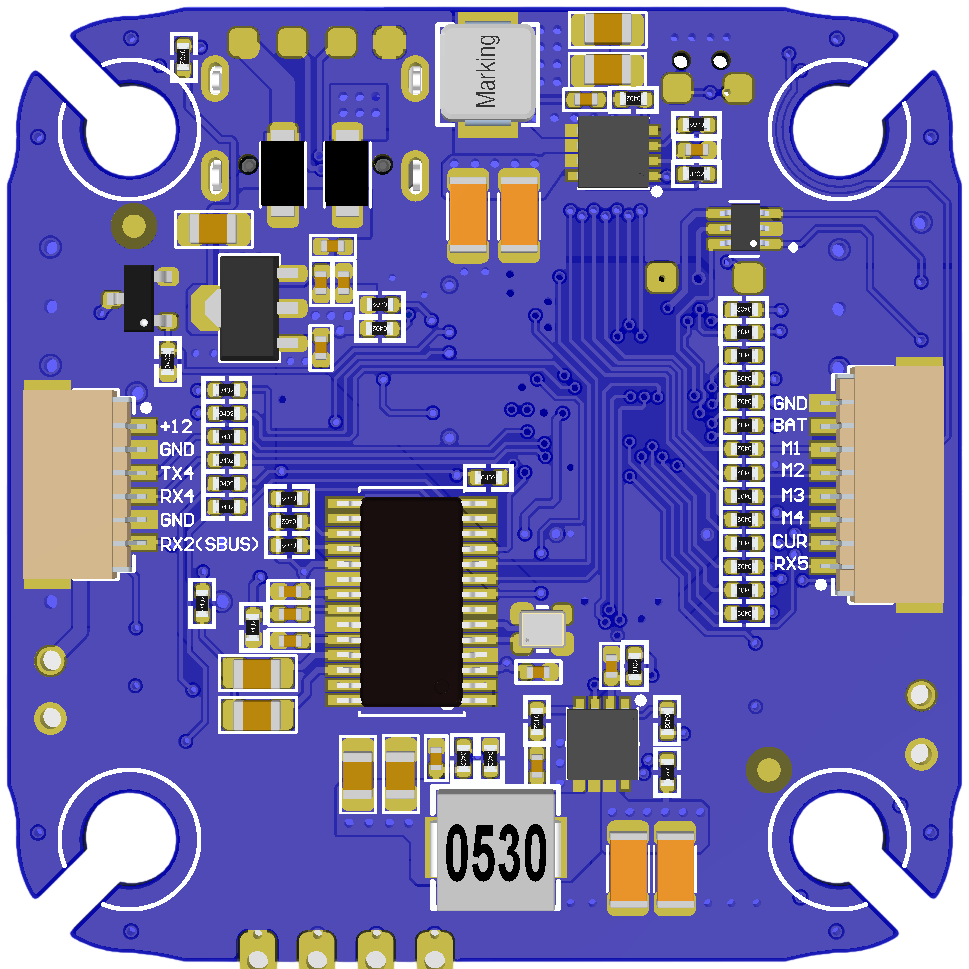
Pinout¶
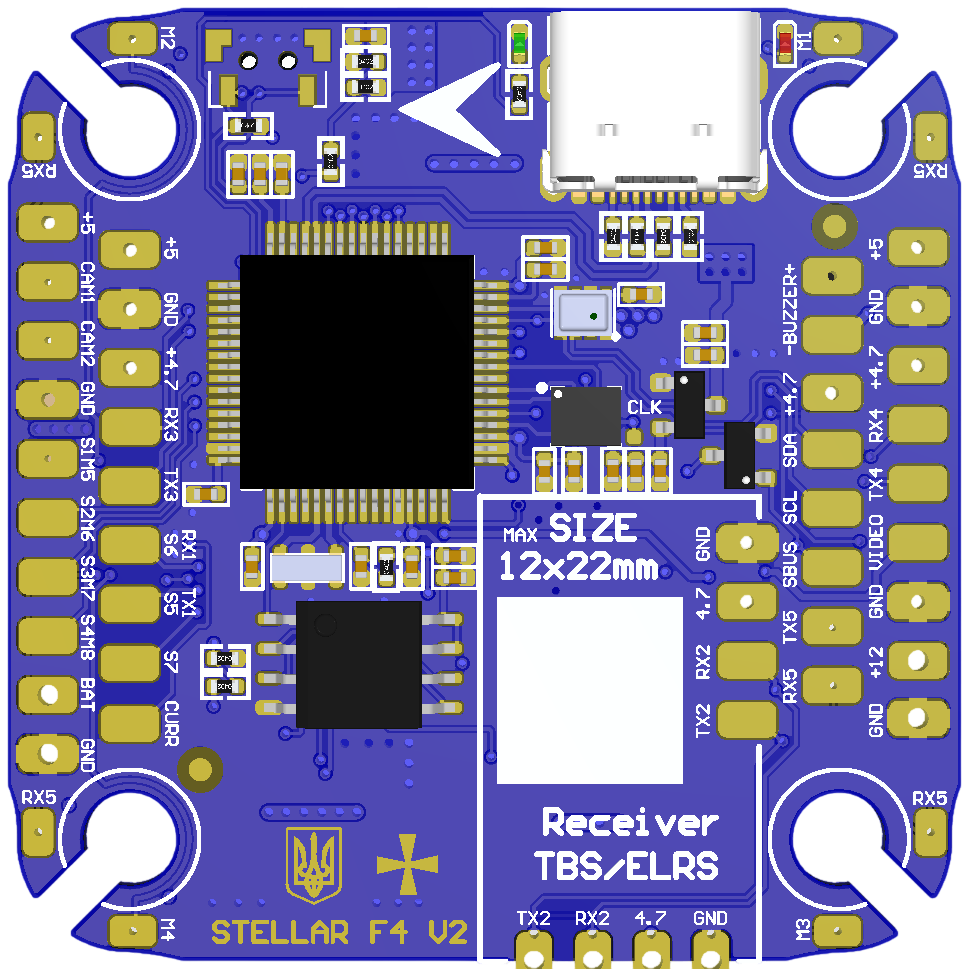
UART Mapping¶
The UARTs are marked RXn and TXn in the above pinouts. The RXn pin is the receive pin for UARTn. The TXn pin is the transmit pin for UARTn.
SERIAL0 -> USB
SERIAL1 -> UART2 (Serial RC input, DMA capable)
SERIAL2 -> UART3 (User)
SERIAL3 -> UART4 (DisplayPort)
SERIAL4 -> UART5 (ESC Telemetry)
RC Input¶
The default RC input is configured on the UART2(SERIAL1) RX2 input and can be used for all ArduPilot supported unidirectional receiver protocols except PPM.
SBUS/DSM/SRXL connects to the RX2 pin.
CRSF also requires a TX2 connection, in addition to RX2, and automatically provides telemetry.
FPort requires connection to TX2 and SERIAL1_OPTIONS set to “7”. See FPort Receivers.
SRXL2 requires a connection to TX2 and automatically provides telemetry. Set SERIAL1_OPTIONS to “4”.
OSD Support¶
StellarF4V2 supports using its internal OSD using OSD_TYPE 1 (MAX7456 driver). External OSD support such as DJI or DisplayPort can be used simultaneously and is preconfigured on SERIAL3 but can be supported on any spare UART. See MSP OSD for more info.
PWM Output¶
StellarF4V2 supports up to 11 PWM/Dshotg outputs. PWM1-4 outputs support Bi-Directional DShot.
Channels 1-4 support bi-directional DShot. Channels 5-8 marked as S1M5-S4M8 on the board. Channels 9-11 marked as S5-S7 on the board. PWM outputs are grouped and every group must use the same output protocol:
1, 2, 3, 4 are Group 1;
5, 6, 7, 8 are Group 2;
9, 10, 11 are Group 3;
Battery Monitoring¶
The board has 1 built-in voltage divider on an ADC input and 1x current ADC input and supports and external 3.3V based current sensor. The voltage input is compatible with 2~8S LiPo batteries.
The default battery parameters are:
BATT_MONITOR = 4
BATT_VOLT_PIN = 10
BATT_CURR_PIN = 11 (CURR pin)
BATT_VOLT_MULT = 11
BATT_AMP_PERVLT = 10
Compass¶
StellarF4V2 does not have a built-in compass, but you can attach an external compass using I2C on the SDA and SCL pads.
Camera Switch¶
GPIO 81 controls which camera input (CAM1 or CAM2) is applied to the internal OSD. A RELAY function can be enabled to control the switching.
Loading Firmware¶
Firmware for these boards can be found at https://firmware.ardupilot.org in sub-folders labeled StellarF4V2.
Initial firmware load can be done with DFU by plugging in USB with the boot button pressed. Then you should load the “ardu*_with_bl.hex” firmware, using your favourite DFU loading tool. eg STM32CubeProgrammer
Subsequently, you can update firmware with Mission Planner.