MFT-SEMA100 Flight Controller¶
The MFT-SEMA100 is a flight controller designed and produced by MFT Savunma ve Havacılık LTD. ŞTİ.
Features¶
STM32H743 microcontroller
BMI088 IMU
BMP390 barometer
LIB3MDL magnetometer
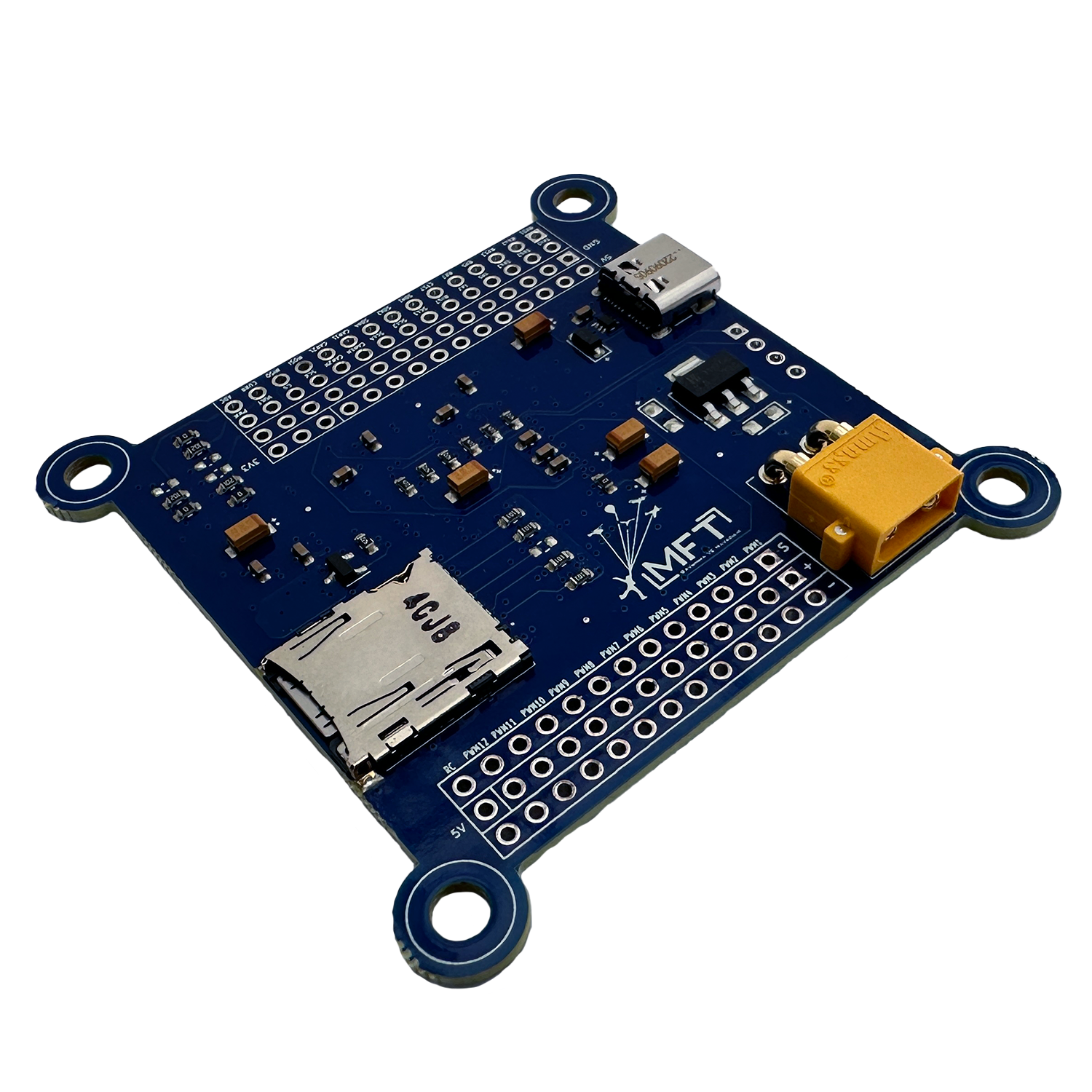
MicroSD Card Slot
5 UARTs
12 PWM outputs
2 CANs
3 I2Cs
Physical¶
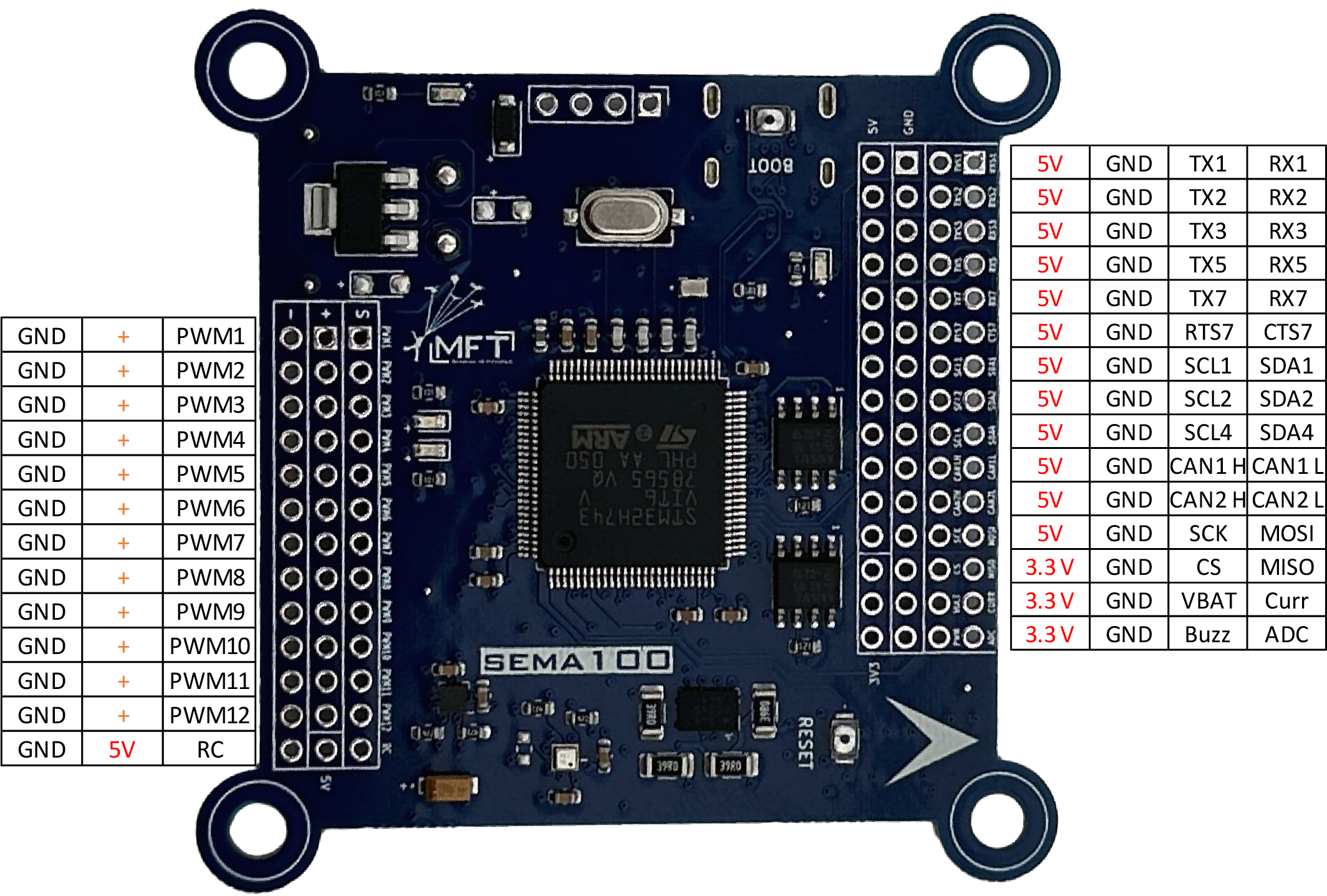
UART Mapping¶
SERIAL0 -> USB
SERIAL1 -> UART1 (MAVLink2, DMA-enabled)
SERIAL2 -> UART2 (MAVLink2, DMA-enabled)
SERIAL3 -> UART3 (GPS, DMA-enabled)
SERIAL4 -> UART5 (GPS2, DMA-enabled)
SERIAL5 -> UART7 (DMA-enabled)
SERIAL6 -> UART8 (RX only)
Connectors¶
All pins are 2.54 mm Pin Headers XT30-PW 5V Input for powering the board
RC Input¶
The default RC input is configured on the UART8 RCIN pin. All ArduPilot supported unidirectional RC protocols can be input here except PPM. For bi-directional or half-duplex protocols, such as CRSF/ELRS a full UART will have to be used. For example if SERIAL2 (UART5) is used for bi-directional RC, then:
SERIAL2_PROTOCOL must be set to “23”, and:
PPM is not supported.
SBUS/DSM/SRXL connects to the R6 pin.
FPort requires connection to Tx and SERIAL2_OPTIONS be set to “7”.
CRSF/ELRS also requires a Tx connection, in addition to Rx, and automatically provides telemetry. Set SERIAL2_OPTIONS to “0”.
SRXL2 requires a connection to Tx and automatically provides telemetry. Set SERIAL2_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
PWM Output¶
The MFT-SEMA100 supports up to 12 PWM outputs which also support DShot.
PWM outputs are grouped and every group must use the same output protocol:
1, 2 are Group 1;
3, 4 are Group 2;
5, 6, 7, 8 are Group 3;
9, 10 are Group 4;
11, 12 are Group 5;
Channels within the same group need to use the same output rate.
GPIOs¶
The numbering of the GPIOs for PIN variables in ArduPilot is:
PWM 1 50
PWM 2 51
PWM 3 52
PWM 4 53
PWM 5 54
PWM 6 55
PWM 7 56
PWM 8 57
PWM 9 58
PWM 10 59
PWM 11 60
PWM 12 61
Battery Monitoring¶
The board has a internal voltage sensor and connections on the ESC connector for an external current sensor input. The voltage sensor can handle up to 6S LiPo batteries.
The default battery parameters are:
BATT_MONITOR 4
BATT_VOLT_PIN 19
BATT_CURR_PIN 8
BATT_VOLT_MULT 10
BATT_CURR_SCALE 10
Compass¶
The MFT-SEMA100 has a built-in compass sensor (LIB3MDL), and you can also attach an external compass using I2C on the SDA and SCL connector.
Analog inputs¶
The IMU heater in the MFT-SEMA100 can be controlled with the BRD_HEAT_TARG parameter, which is in degrees C.
Mechanical¶
Mounting: 55 x 56 mm, Φ4 mm
Dimensions: 64 x 65 x 10 mm
Weight: 15g
Loading Firmware¶
Firmware for these boards can be found at https://firmware.ardupilot.org in sub-folders labeled “MFT-SEMA100”.
The board comes pre-installed with an ArduPilot compatible bootloader, allowing the loading of *.apj firmware files with any ArduPilot compatible ground station.