Testing OSD with SITL¶
MSP Telemetry OSDs¶
Note
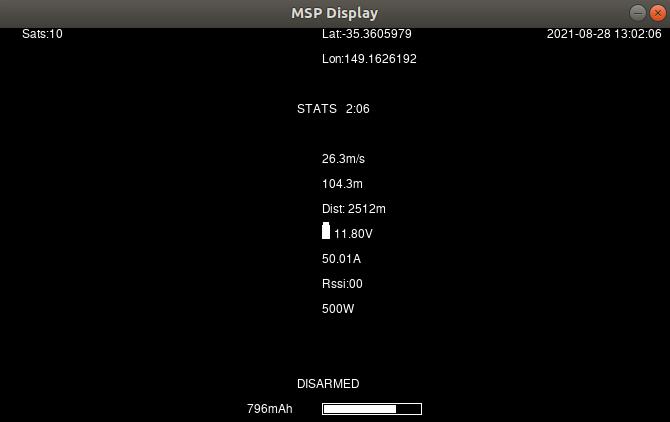
The emulation supports multiple screens and stats, but not yet Display Port
MSP OSD functionality can be tested and panel items adjusted without autopilot or video hardware using the Software In The Loop (SITL) simulator setup. Follow those SITL-Instructions to setup a simulation environment. Run the simulator on current source code using --osdmsp option to build the OSD code into the simulator. For example, for a plane simulation:
sim_vehicle.py -v ArduPlane --console --osdmsp
A graphical DJI style MSP OSD simulation in a separate window will be opened with the other simulation windows using a typical set of OSD panel parameters, located at libraries/AP_MSP/Tools/osdtest.parm . Then the OSD elements can be customized by their parameters using the MSP OSD emulation program to visualize the OSD.
Note
You could also use these parameters to initially setup the MSP OSD panels and positions for use with goggles, but still need to correctly configure the Serial port and other parameters for the particular OSD system.
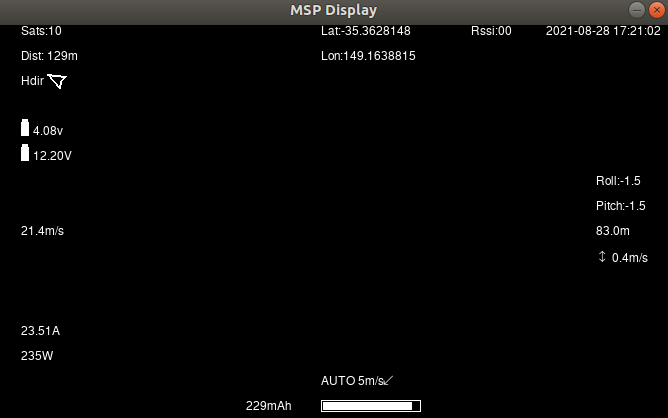
By changing the OSD panel items’ parameters, a live update of their placement can be seen in this emulator.
Onboard OSD¶
OSD functionality can be tested without autopilot- or video-hardware using a Software In The Loop (SITL) simulator setup. Follow the SITL-Instructions to setup a simulation environment. Run the simulator on current source code.
A graphical OSD simulation in a separate window can be opened by adding the following option to sim_vehicle.py:
--osd
The simulated OSD can now be set and configured via parameters.
As above, by changing the OSD panel items’ parameters, a live update of their placement can be seen in this emulator.
Note
The emulation does not support units other than metric