Ethernet Adapters and Switches¶
Ardupilot has the ability to use Ethernet peripherals and networking (see Ethernet / Network Setup). This page includes various switches and adapters known to work
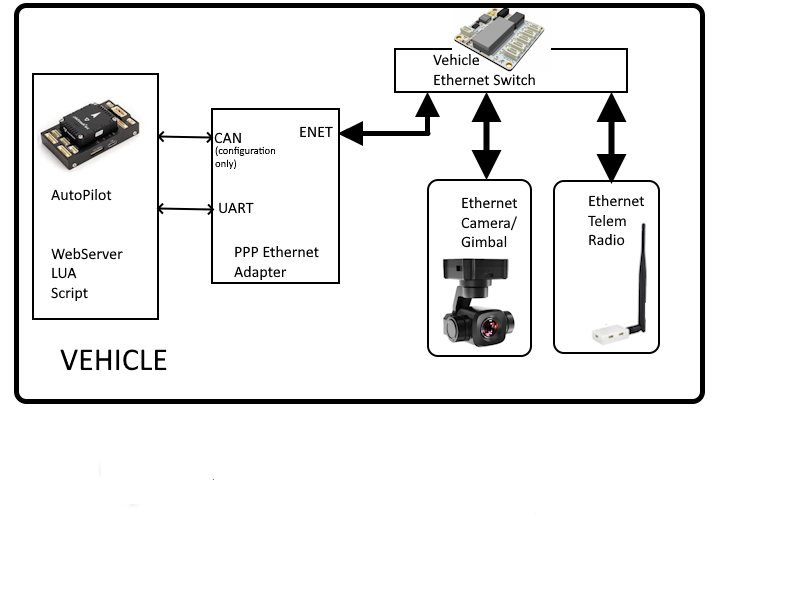
Most H7 based autopilots do not include native ethernet support but ethernet networking capability can be added using an Ethernet Adapter (see BotBlox DroneNet and CubePilot CubeNode ETH below) which provide connectivity using PPP protocol over the autopilot’s serial port.
Hardware¶
BlueRobotics Ethernet Switch : 5-port ethernet switch designed in collaboration with BotBlox
BotBlox SwitchBlox for Ardupilot : ethernet switch to allow connecting multiple devices together
BotBlox DroneNet for Ardupilot: ethernet switch with CAN, USART, RS485, and GPIO/PWM adapters allowing non-ethernet devices including autopilots to work over ethernet
BotBlox SwitchBlox Cable Adapter for Ardupilot : adapter to ease the ethernet port differences across different device manufacturers
CubePilot CubeNode ETH: serial to ethernet adapter to allow non-ethernet autopilots to work over ethernet using PPP
CubePilot CubeLAN 8-Port Switch : ethernet switch using the CubePilot preferred 5-pin connector