KOGGER Underwater Sonar¶
The KOGGER Sonar is a compact and low-cost underwater echosounder module with UART interface, 5-14Volts Power Supply Voltage.

Recommended Hardware¶
CP210x USB->UART converter and Windows PC with Kogger Application installed.
Configuring the echosounder module¶
The module should be configured before it is connected to the ArduPilot. You need the KOGGER Sonar module connected to computer. The GUI is opensource Kogger Application.
Make the following adjustment in the GUI:

Select the assigned COM-port and press green RUN button
- Set the following rangefinder parameters:
Max distance = 50000
Dead zone = 100
Confidence = 0
- Set the following transducer parameters:
Pulse count = 10
Frequency = 700kHz
Booster = ON
- Set the following dataset parameters:
Period = 100ms
Rangefinder = NMEA
Press “Flash settings”
That’s it. The module is ready to use with autopilot.
Connecting to the ArduPilot hardware¶
The KOGGER Sonar provides distance measurements using the NMEA protocol over serial/uart.
If the SERIAL2 (TELEM2) is used then the following parameters should be set:

The sensor can be connected to any available serial/uart port on the autopilot. In the diagram below the first sensor is connected to SERIAL2 (TELEM2).
SERIAL2_PROTOCOL = 9 (Lidar)
SERIAL2_BAUD = 115 (115200 baud)
Then the following range finder related parameters should be set:
RNGFND1_TYPE = 17 (NMEA)
RNGFND1_MIN = 0.3
RNGFND1_MAX = 50 (i.e. 50m). This is the distance in meters that the rangefinder can reliably read.
RNGFND1_ORIENT = 25 (i.e. down) if mounted on a boat
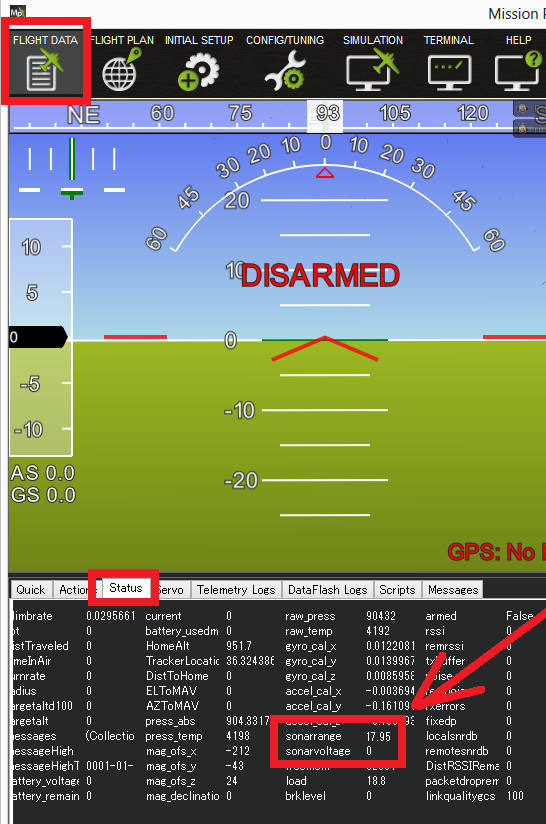
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.