Benewake TF02-Pro / TF03 / TFS20-L / TF-Luna / TF-Nova / TF350¶
Benewake provides a range of lidar sensors that use proprietary serial and/or CAN interfaces

Model |
Range (Min/Max) |
Weight |
Voltage |
FOV |
Interface |
|---|---|---|---|---|---|
TF02 (discontinued) |
0.22m / 10m |
52g |
5V |
3 deg |
UART |
0.40m / 13.5m |
50g |
5V~12V |
3 deg |
UART |
|
0.40m / 13.5m |
60g |
7V~30V |
3 deg |
CAN |
|
1m / 50m |
89g |
5V~24V |
0.5 deg |
UART, CAN |
|
0.20m / 15m |
2g |
3.3V |
2 deg |
UART |
|
0.80m / 3m |
5g |
3.7V~5.2V |
2 deg |
UART |
|
0.14m / 7m |
5g |
5V |
14 deg |
UART |
|
3.5m / 150m |
224g |
5V~24V |
0.35 deg |
UART, CAN |
More details on these lidar can be found in the benewake.com’s downloads section
Where to Buy¶
Connecting via Serial¶
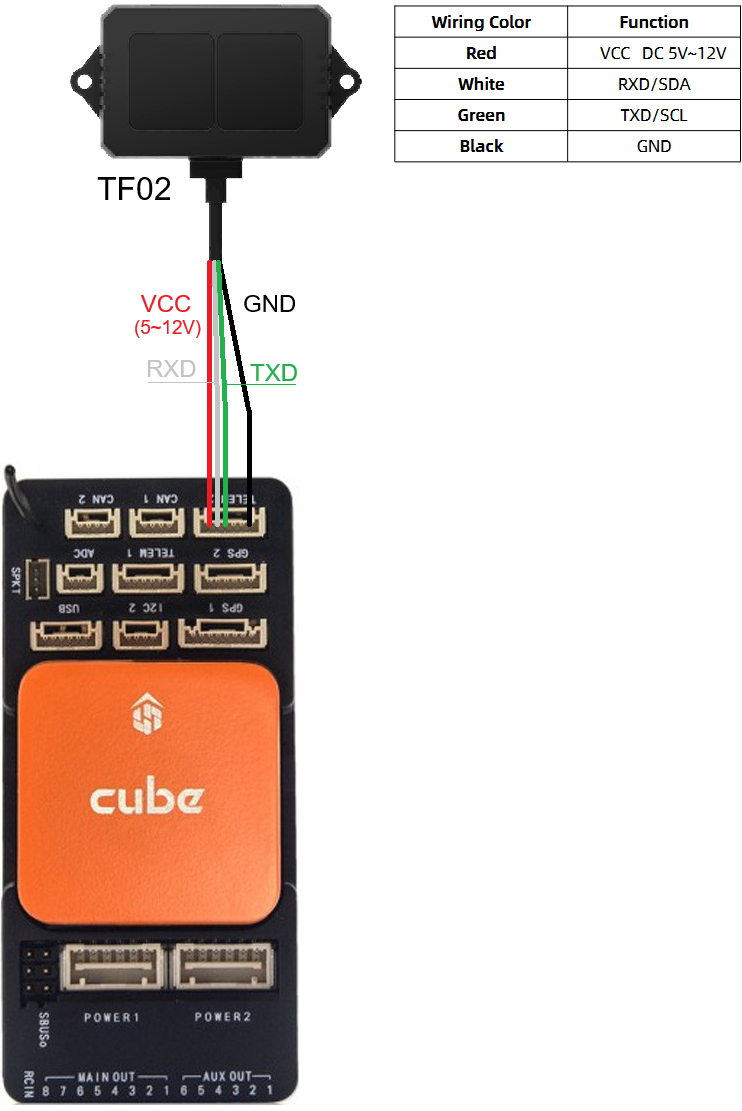
For a serial connection you can use any spare Serial/UART port. The diagram below shows how to connect a TF02 to Serial2. Please note that wire colours may vary by model so please check the datasheet.
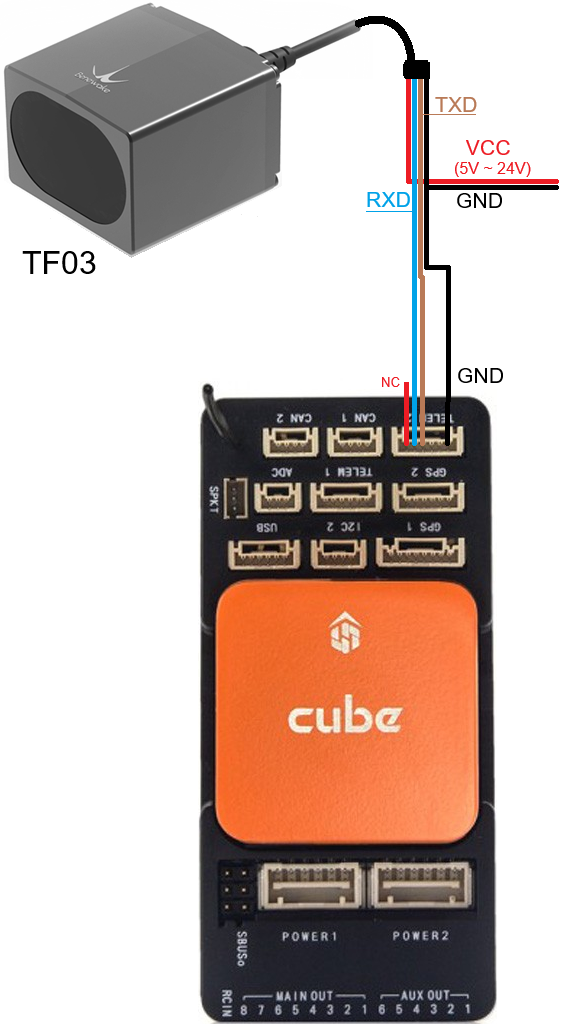
The diagram below shows how to connect a TF03 to Serial2
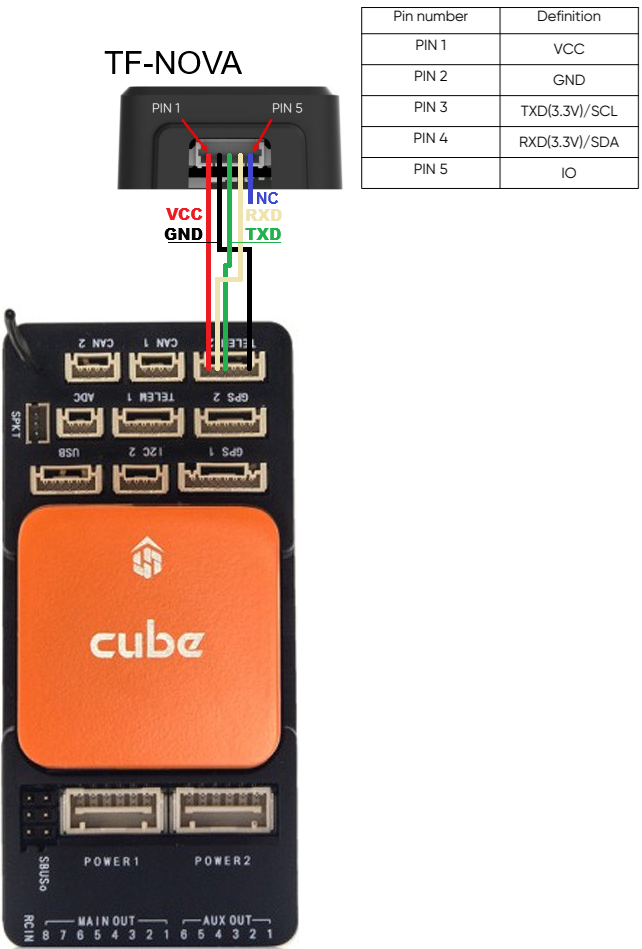
The diagram below shows how to connect a TF-Nova to Serial2
If SERIAL2 is being used, then use the following parameters to set the first rangefinder:
SERIAL2_PROTOCOL = 9 (Lidar)
SERIAL2_BAUD = 115 (115200 baud)
RNGFND1_TYPE = 19 (BenewakeTF02) for TF02, 27 (BenewakeTF03) for TF02-Pro, TF03, TFS20-L, TF-Luna, TF-Nova, TF350.
RNGFND1_MIN = Use a distance the rangefinder could reliably read in [metres]. For TF02: 0.22, for TF03: 1, or look up the top table of this page for other sensors.
RNGFND1_MAX = Use a distance the rangefinder could reliably read in [metres]. For TF02: 10, for TF03: 50, or look up the top table of this page for other sensors.
RNGFND1_ORIENT = 25 (Down) Indicates the position the rangefinder is set to read.
RNGFND1_GNDCLR = 0.1 An accurate distance in [metres] from the rangefinder to the ground when the vehicle is landed. This value depends on how you have mounted the rangefinder.
Connecting via CAN¶
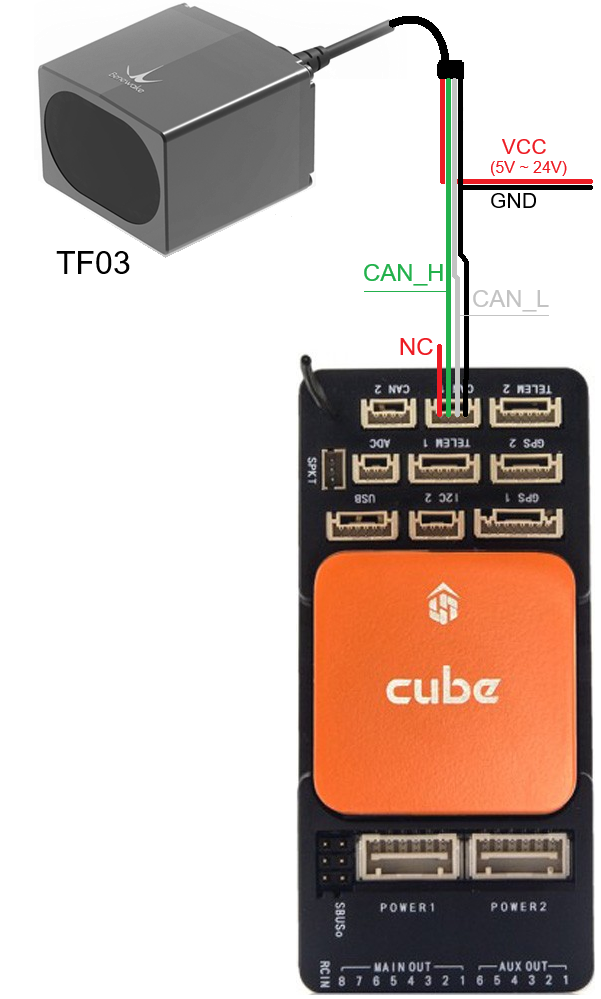
The TF02-i, TF03, TFmini-i and TF350 can be connected to the autopilot via CAN. The diagram below shows how to connect a TF03 to CAN1. Please note that wire colours may vary by model so please check the datasheet.
If CAN1 is used then set the following parameters:
CAN_P1_DRIVER = 1 (First driver)
CAN_D1_PROTOCOL = 11 (Benewake)
RNGFND1_TYPE = 34 (Benewake_CAN)
RNGFND1_MIN = Use a distance the rangefinder could reliably read in [metres]. For TF02-i: 0.4, for TF03: 1, or look up the top table of this page for other sensors.
RNGFND1_MAX = Use a distance the rangefinder could reliably read in [metres]. For TF02-i: 13.5, for TF03: 50, or look up the top table of this page for other sensors.
RNGFND1_ORIENT = 25 (Down) Indicates the position the rangefinder is set to read.
RNGFND1_GNDCLR = 0.1 An accurate distance in [metres] from the rangefinder to the ground when the vehicle is landed. This value depends on how you have mounted the rangefinder.
Note
Check the information at Sensor Position Offset Compensation in order to configure the position where the range finder is installed.
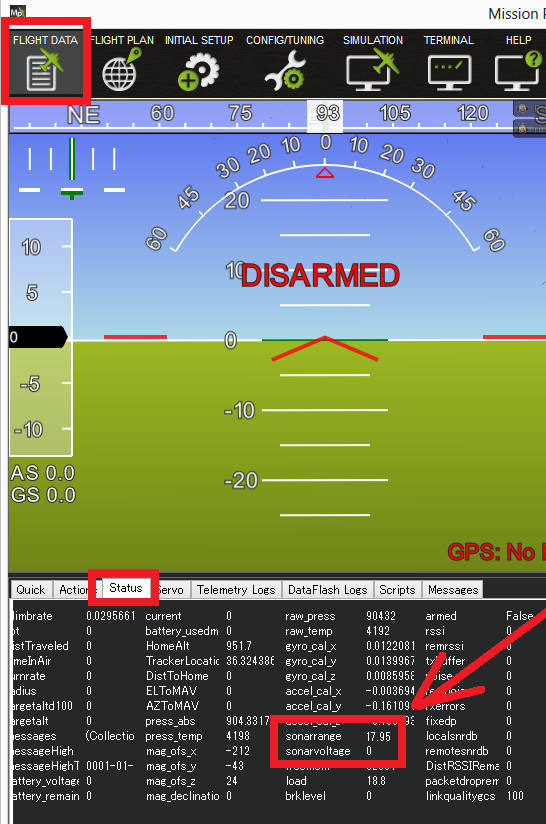
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.