LDRobot LD-06 Lidar¶
This Lidar is supplied by numerous sources:

Features¶
12m measuring radius
30000lux resistance to strong light
4500HZ measurement frequency
360°scanning range
Laser safety FDA Class I
TOF flight time ranging
Compact appearance
Waterproof and dustproof-IPX4
10000h service life
Connecting and Configuring¶
The lidar should be mounted horizontally on the top or bottom of the vehicle with the arrow on top of the unit pointing towards the front of the vehicle. Ensure the sensor’s view is not obstructed by any portion of the vehicle including GPS mast, vehicle legs etc.
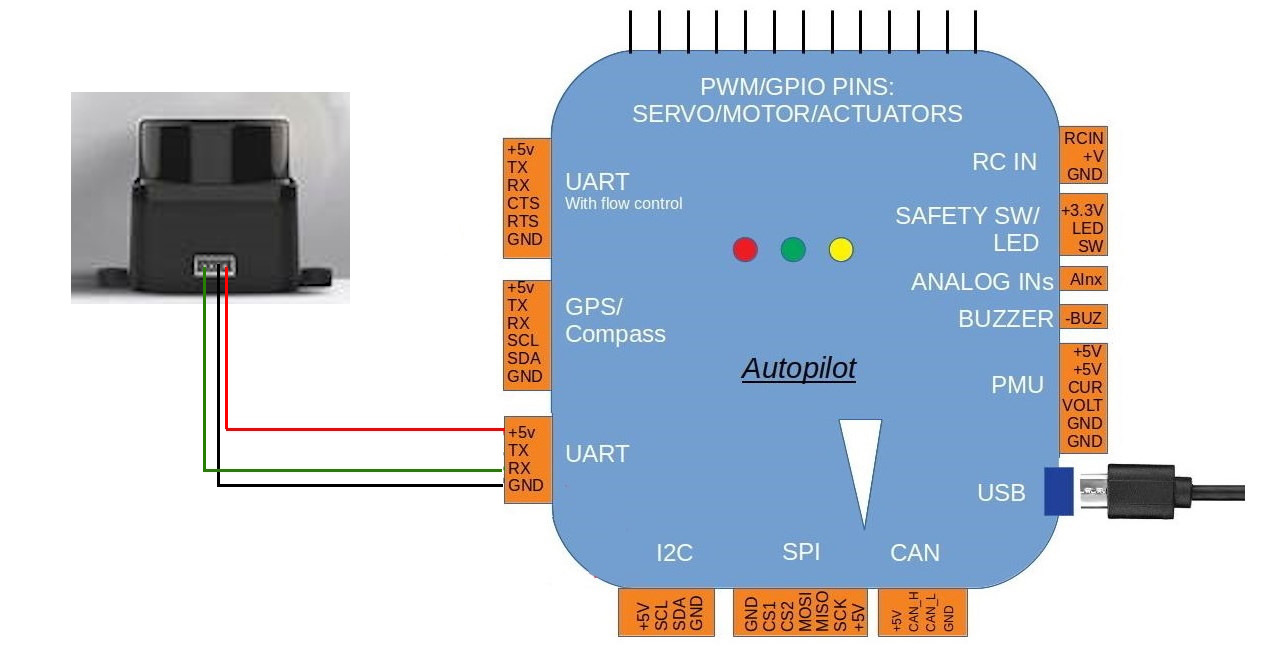
The lidar can be connected to the autopilot’s serial input as shown above. If using a Pixhawk/Pixhawk 2.1 (CubePilot CubeBlack) Telem1 (aka Serial1) should be used because it is more capable of providing the required power.
Note
only the Lidar’s TX pin is used. Its pwm motor control input pin is not connected and the lidar will spin at a default rate (reported in its telemetry back to the autopilot).
Example setup below shown for first proximity sensor:
SERIAL1_PROTOCOL = “11” (“Lidar360”) if using Serial1
SERIAL1_BAUD = “230” if using Serial1 as connection port
PRX1_TYPE = “16”
PRX1_ORIENT = “0” if mounted on the top of the vehicle, “1” if mounted upside-down on the bottom of the vehicle.
It may be necessary to turn off flow control if using Telem1 (aka Serial1) or Telem2 (aka Serial2)
BRD_SER1_RTSCTS = “0” if using Serial1
More details on using this sensor for object avoidance on Copter can be found here.