CUAV PW-Link¶

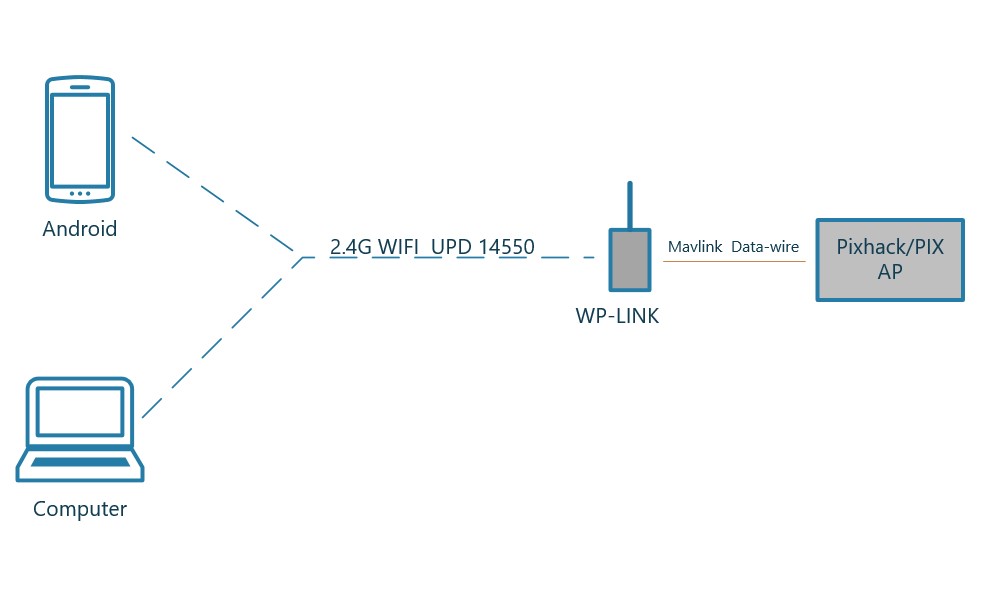
CUAV PW-LINK is an ESP8266 based 2.4Ghz WIFI telemetry radio. It connects to any ArduPilot telemetry port using +5V,gnd,TX and RX signals. Running at the standard default parameters of 57.6 Kbaud and MAVLink2 telemetry protocol, it connects via the standard Mission Planner/ QGC UDP port 14550 over WIFI.
With its external antenna, range of 450 meters is typical.
Connecting to the Ground Station¶
Open WIFI connection dialog on PC or Android Phone and select the CUAVWLINKxxxx SSID and connect using the password cuavwlink. Once connected use the UDP connection with port = 14550 (which is default) to connect using Mission Planner. QGC should auto-detect and connect.
The PW-LINK default IP address is 192.168.4.1.
MAVProxy¶
The following command can be used to connect a MAVProxy ground station to the vehicle.
mavproxy.py --master :14550