Clock/Time Synchronisation¶
The flight controller and companion computer clocks can be synchronised using MAVLink’s SYSTEM_TIME and TIMESYNC messages. This is important so that each side can blend data from the other side into its EKF.
mavros’s sys_time plugin implements the mavros/ROS side
ArduPilot’s AP_RTC library implements the ArduPilot side
Mavros Configuration¶
Mavros’s apm_config.yaml file can be modified to configure the rate of the SYSTEM_TIME and TIMESYNC messages. Below are the recommended settings.
conn:
timesync_rate: 10.0
system_time_rate: 1.0
time:
timesync_mode: MAVLINK
ArduPilot Configuration¶
The flight controller’s time is set from the GPS by default but can be set from one of three sources(GPS, MAVLINK, onboard HW clock) using the BRD_RTC_TYPES parameter as a bit mask for the time synchronisation source. When using mavros set BRD_RTC_TYPES = 2 to only allow the “MAVLINK_SYSTEM_TIME” source which uses the SYSTEM_TIME MAVLINK message.
If the RTT too high for timesync message is shown in the Mavros console (most commonly when using ArduRover), the SCHED_LOOP_RATE parameter should be increased. This is because Mavros ignores TIMESYNC messages if the round trip time is more than 10ms.
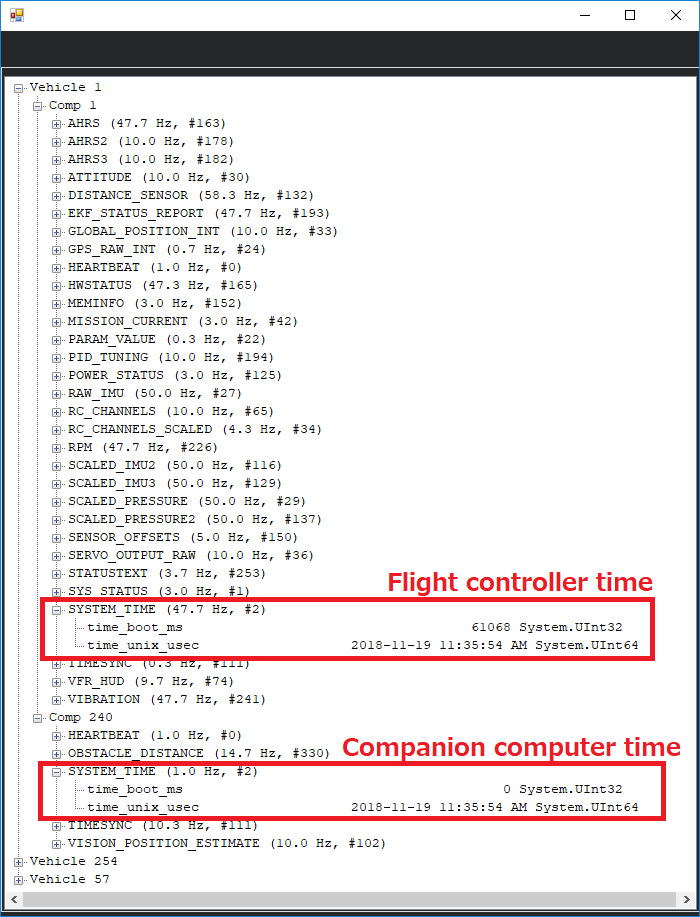
Testing¶
A MAVLink inspector (available using QGC or MissionPlanner) can be used to check that the system times are synchronised. If using Mission Planner, press Ctrl-F and push the “MAVLink Inspector” button.