Data from AP to ROS¶
Mavros consumes MAVLink sensor data messages from ArduPilot and places the data within the /mavros/ topic
IMU data¶
ArduPilot sends accelerometer, gyro and compass (aka “mag”) data to ROS/mavros using MAVLink’s RAW_IMU message.
mavros consumes this data and places it within the following topics:
/mavros/imu/data and /mavros/imu/data_raw hold the accelerometer (called “linear_acceleration”) and gyro (called “angular_velocity) data
/mavros/imu/mag holds the compass data. This may be all zero if AP’s COMPASS_USE parameters have been set to zero
Checking and setting the data rate¶
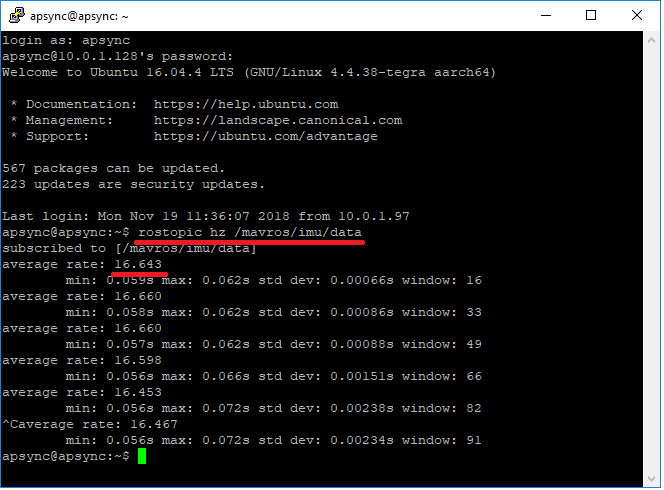
Run the following command to view the accelerometer and gyro data and update rate on the companion computer running ROS
rostopic echo /mavros/imu/data <-- to see the data itself
rostopic hz /mavros/imu/data <-- to view the update rate
mavros can be used to send a command to ArduPilot to change the rate of the data as shown below
rosrun mavros mavsys rate --all 10 <-- to set the data rate for all data to 10hz
rosrun mavros mavsys rate --extra1 10 <-- to set the data rate for IMU_RAW to 10hz
rosrun mavros mavsys rate --help <-- to see help on this command
From within ArduPilot the default update rate of the IMU data sent to ROS/mavros can be set by changing the SRx_EXTRA1 parameter (where “x” is normally the serial port number on the flight controller)
Warning
Users of APSync may notice that APWeb resets the data stream rates to 4hz every 10 seconds. This is a known issue that can be worked around by editing the /etc/rc.local file and commenting out the line that starts APWeb.
Note
If you notice AP is sending data at a higher rate than requested it may be because of this issue