ROS for Object Avoidance¶
This page describes how to setup ROS’s base local planner to provide velocity commands to ArduPilot to steer a rover around obstacles. This assumes all the previous setup including Cartographer and rviz have already been completed.
These instructions were tested on a Nvidia TX2 running an APSync image with ROS installed as described here.
Some of the information on this page was found on these wiki pages:
Note
these pages are a work-in-progress
Companion Computer Setup¶
ssh onto the companion computer. If using APsync the following should work (password is “apsync”)
ssh apsync@apsync.local
Configure mavros to send velocity targets to ArduPilot by modifying mavros’s node.launch file with your favourite editor (like gedit shown below)
roscd mavros <-- this assumes mavros has been installed with rosdep
cd launch
sudo gedit node.launch
After
<rosparam command="load" file="$(arg config_yaml)" />add a line like below
<remap from="/mavros/setpoint_velocity/cmd_vel_unstamped" to="/cmd_vel" />
Install ros-kinetic-navigation package
sudo apt-get install ros-kinetic-navigation
Download ArduPilot/companion/Common/ROS/ap_navigation.zip to the catkin_ws/src directory
cd ~/catkin_ws/src
wget https://github.com/ArduPilot/companion/raw/master/Common/ROS/ap_navigation.zip
unzip ap_navigation.zip
Rebuild all packages including ap_navigation
cd ~/catkin_ws
source devel/setup.bash
catkin build
Sending Position Targets¶
Arm the vehicle and switch to Guided mode
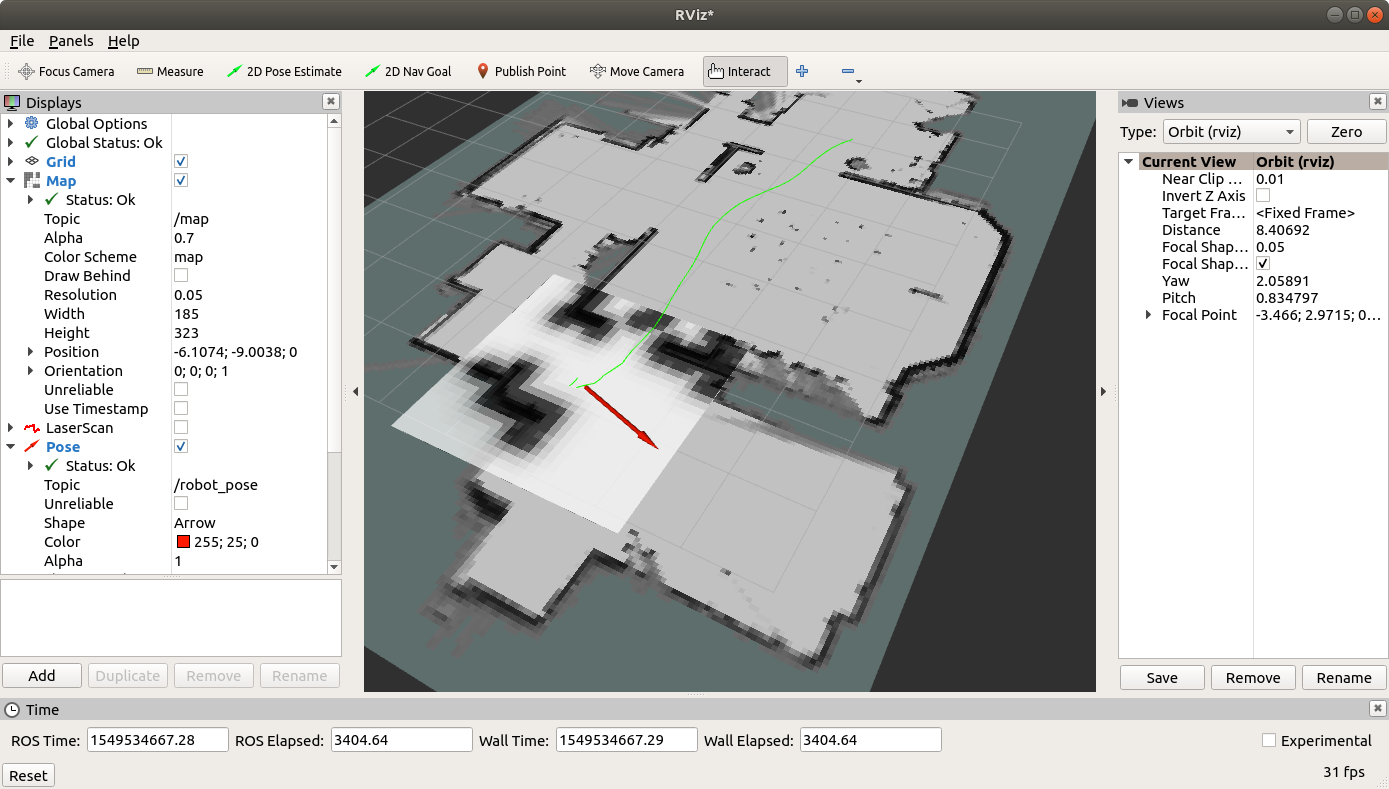
Use rviz’s “2D Nav Goal” button to set a position target. If all goes well a green line will appearing showing the route the vehicle will take to the target (see top image)