Auxiliary Functions¶
This page describes how to set up additional features which can be invoked from the transmitter’s auxiliary function switches, from Mission Planner using the Aux function sub-tab of the Data tab, via MAVLink/Mission command (MAV_CMD_DO_AUX_FUNCTION) or from external buttons.
Configuring which transmitter channel is used¶
Any RC input channel can be assigned any auxiliary function. However, the RC channel should not be used by any other function, such as flight mode selection or flight controls. By default, channels 1-4 are used for flight controls (i.e. roll, pitch, throttle, and yaw). The default flight mode channel is 8 for Plane and Rover, and 5 for Copter.
Assigning the Feature¶
The RCx_OPTION parameters control these features. For example, the RC7_OPTION parameter controls which feature is assigned to RC input 7. Each RC channel has its
own RCx_OPTION parameter that can be accessed in the full parameter list.
Supported Features¶
RCx_OPTION value |
Feature Description |
Copter |
Plane |
Rover |
Sub |
0 |
Do Nothing (Default) |
X |
X |
X |
X |
2 |
FLIP |
X |
|||
3 |
SIMPLE mode (Copter) |
X |
|||
4 |
RTL mode |
X |
X |
X |
|
5 |
Save Trim |
X |
X |
||
7 |
Save Waypoint |
X |
X |
||
9 |
Camera Trigger |
X |
X |
X |
X |
10 |
Rangefinder |
X |
|||
11 |
Fence |
X |
X |
X |
X |
12 |
ResetToArmedYaw |
||||
13 |
SUPERSIMPLE mode |
X |
|||
14 |
Acro Trainer |
X |
|||
15 |
Sprayer |
X |
|||
16 |
AUTO mode |
X |
X |
X |
|
17 |
AUTOTUNE mode |
X |
|||
18 |
LAND Mode |
X |
|||
19 |
Gripper |
X |
X |
X |
X |
21 |
Parachute Enable |
X |
|||
22 |
Parachute Release |
X |
X |
||
23 |
Parachute 3 Pos Switch |
X |
|||
24 |
Reset Auto Mission to start |
X |
X |
X |
X |
25 |
Attitude Controller FF |
X |
|||
26 |
Attitude Controller AccLim |
X |
|||
27 |
Retract Mount1 |
X |
X |
X |
X |
28 |
Relay 1 On/off |
X |
X |
X |
X |
29 |
Landing Gear |
X |
X |
||
30 |
Lost Vehicle Sound |
X |
X |
X |
|
31 |
Motor Emergency Stop |
X |
X |
X |
X |
32 |
Motor Interlock |
X |
|||
33 |
BRAKE |
X |
|||
34 |
Relay 2 On/Off |
X |
X |
X |
X |
35 |
Relay 3 On/Off |
X |
X |
X |
X |
36 |
Relay 4 On/Off |
X |
X |
X |
X |
37 |
THROW mode |
X |
|||
38 |
ADSB Avoidance Enable |
X |
|||
39 |
Precision Loiter |
X |
|||
40 |
Object Avoidance |
X |
X |
||
41 |
Arm Disarm (4.1 and before) |
X |
X |
X |
|
42 |
SMARTRTL mode |
X |
X |
||
43 |
Inverted Flight |
X |
X |
||
44 |
Winch Enable |
X |
|||
45 |
Winch Control |
X |
|||
46 |
RC Override Enable |
X |
X |
X |
X |
47 |
Rsvd for custom function |
X |
|||
48 |
Rsvd for custom function |
X |
|||
49 |
Rsvd for custom function |
X |
|||
50 |
Learn Cruise |
X |
|||
51 |
MANUAL mode |
X |
X |
||
52 |
ACRO mode |
X |
X |
||
53 |
STEERING mode |
X |
|||
54 |
HOLD mode |
X |
|||
55 |
GUIDED mode |
X |
X |
X |
|
56 |
LOITER mode |
X |
X |
||
57 |
FOLLOW mode |
X |
X |
||
58 |
Clear Waypoints |
X |
X |
X |
X |
59 |
SIMPLE mode (Rover) |
X |
|||
60 |
ZIGZAG mode |
X |
|||
61 |
ZIGZAG mode - Save Waypts |
X |
|||
62 |
Compass Learn |
X |
X |
X |
X |
63 |
Sailboat Tack |
X |
|||
64 |
Reverse Throttle |
X |
|||
65 |
GPS Disable |
X |
X |
X |
X |
66 |
Relay 5 On/Off |
X |
X |
X |
X |
67 |
Relay 6 On/Off |
X |
X |
X |
X |
68 |
STABILIZE mode |
X |
|||
69 |
POSHOLD mode |
X |
|||
70 |
ALTHOLD mode |
X |
X |
||
71 |
FLOWHOLD mode |
X |
|||
72 |
CIRCLE mode |
X |
X |
X |
|
73 |
DRIFT mode |
X |
|||
74 |
Sailboat Motor 3Pos Sw |
X |
|||
75 |
Surface Tracking Up/Down |
X |
|||
76 |
STANDBY mode |
X |
|||
77 |
TAKEOFF mode |
X |
|||
78 |
RunCam Control |
X |
X |
X |
X |
79 |
RunCam OSD Control |
X |
X |
X |
X |
80 |
Viso Align |
X |
|||
81 |
Disarm |
X |
X |
X |
X |
82 |
Q_Assist 3Pos Sw |
X |
|||
83 |
ZIGZAG Auto |
X |
|||
84 |
AIRMODE(not a flight mode) |
X |
X |
||
85 |
Generator |
X |
X |
X |
|
86 |
Non Auto Terrain Follow Disable |
x |
|||
87 |
CROW Mode Switch |
X |
|||
88 |
Soaring Enable |
X |
|||
89 |
Force Flare |
X |
|||
90 |
EKF Source Set |
X |
X |
X |
|
91 |
Airspeed Ratio Calibrate |
X |
|||
92 |
FBWA Mode |
X |
|||
94 |
VTX Power |
X |
X |
X |
X |
95 |
FBWA_TAILDRAGGER |
X |
|||
96 |
MODE_SWITCH_RESET |
X |
|||
97 |
WindVane home dir offset |
X |
|||
102 |
Camera Mode Toggle |
X |
X |
X |
X |
103 |
Trigger EKF lane switch |
X |
X |
X |
X |
104 |
Trigger EKF yaw reset |
X |
X |
X |
X |
105 |
GPS Disable Yaw (testing only!) |
X |
X |
X |
X |
106 |
Disable Airspeed Use |
X |
X |
X |
|
107 |
Enable Autotuning |
X |
|||
108 |
QRTL Mode |
X |
|||
111 |
Loweheiser Starter |
X |
X |
X |
X |
112 |
SwitchExternalAHRS |
X |
X |
X |
X |
113 |
Retract Mount2 |
X |
|||
150 |
CRUISE Mode |
X |
|||
151 |
TURTLE Mode |
X |
|||
152 |
SIMPLE mode heading reset |
X |
|||
153 |
ARM/DISARM (4.2 and higher) |
X |
X |
X |
X |
154 |
ARM/DISARM with AIRMODE on |
X |
X |
||
155 |
TRIM RC/SERVO Save |
X |
X |
||
156 |
Torqeedo Error Clear |
X |
|||
157 |
Force FBWA Long FS Action |
X |
|||
158 |
Optflow Calibration |
X |
X |
||
159 |
Force Flying State |
X |
|||
160 |
WeatherVane Enable |
X |
|||
161 |
Turbine Start (Heli) |
X |
|||
162 |
Auto Throttle Notch Setup |
X |
X |
||
163 |
Mount Yaw Lock |
X |
X |
X |
X |
164 |
Pause Streaming Logging |
X |
X |
X |
X |
165 |
ARM/Motor Emergency Stop |
X |
X |
X |
X |
166 |
Camera Record Video |
X |
X |
X |
X |
167 |
Camera Zoom |
X |
X |
X |
X |
168 |
Camera Manual Focus |
X |
X |
X |
X |
169 |
Camera Auto Focus |
X |
X |
X |
X |
170 |
QSTABILIZE mode |
X |
|||
171 |
Compass Calibration |
X |
X |
X |
|
172 |
Battery MPPT Enable |
X |
X |
X |
|
173 |
Plane AUTO Landing Abort |
X |
|||
174 |
Camera Image Tracking |
X |
X |
X |
X |
175 |
Camera Lens |
X |
X |
X |
X |
176 |
VTOL Fwd Throttle disable |
X |
|||
177 |
Mount LRF Enable |
X |
X |
X |
X |
178 |
FlightMode Pause/Resume |
X |
|||
179 |
ICEngine start / stop |
X |
|||
180 |
Autotune_test_gains |
X |
X |
||
181 |
VTOL QuickTune |
X |
|||
182 |
AHRS AutoTrim |
X |
|||
183 |
AUTOLAND mode |
X |
|||
184 |
System ID |
X |
|||
185 |
Mount RP Lock |
X |
X |
X |
X |
186 |
Mount POI Lock |
X |
X |
X |
X |
Intended as continuous PWM range control inputs:
RCx_OPTION value |
Feature Description |
Copter |
Plane |
Rover |
Sub |
201 |
ROLL Input |
X |
|||
202 |
PITCH Input |
X |
|||
203 |
THROTTLE Input |
||||
204 |
YAW Input |
||||
207 |
Mainsail |
X |
|||
208 |
Flap Control |
X |
|||
209 |
Forward Throttle |
X |
|||
210 |
Airbrakes |
X |
|||
211 |
Walking Robot Height |
X |
|||
212 |
Mount1 Roll |
X |
X |
X |
X |
213 |
Mount1 Pitch |
X |
X |
X |
X |
214 |
Mount1 Yaw |
X |
X |
X |
X |
215 |
Mount2 Roll |
X |
X |
X |
X |
216 |
Mount2 Pitch |
X |
X |
X |
X |
217 |
Mount2 Yaw |
X |
X |
X |
X |
218 |
Loweheiser Throttle |
X |
X |
X |
X |
219 |
Transmitter Tuning Channel |
X |
|||
300-315 |
Scripting RC channels |
X |
X |
X |
X |
316 |
Scripting Stop/Restart |
X |
X |
X |
X |
Note
203-204 are not implemented for any vehicle, reserved for future use.
Note
Motion axis/Attittude control channels can be remapped using RC Input Channel Mapping (RCMAP).
Description of Features¶
Note
in descriptions below, LOW and HIGH for a channel refers to PWM <1200us and >1800us, respectively.
Mode Switches¶
Any feature ending with “mode” provides the ability to switch the vehicle into that mode by setting the RC channel to high. You can have multiple “mode” option switches and more than one can be high at a time. The last “mode” change switch will determine the current mode, as well as any change of the normal mode switch.
For example, if you have a “LOITER mode” switch active and then an “AUTO mode” switch is switched high, the mode will change to AUTO. Changing the normal flight mode switch will again change the mode to the new flight mode setting, even though both RCx_OPTION mode switches are high. Lowering an active RCx_OPTION mode switch back to low will return the flight mode to whatever is set on the flight mode channel, but only if the current mode matches the mode set by that switch. Otherwise, it will have no effect.
Note
Copter and Rover mode changes are not guaranteed. They may be denied if the conditions required for that mode are not met. For example, changing to LOITER mode in Copter would fail if the GPS lock is not active, whereas in Plane the demanded mode will change and operate as best as it can.
Note
If mapped to a three-position switch then the SUPERSIMPLE mode function will allow SUPERSIMPLE and SIMPLE modes to be enabled using the high and middle switch positions, respectively (a two-position switch will enable/disable SUPERSIMPLE mode only). See here for more details.
Other functions are:
Option
Description
Flip
Save Trim
Save Waypoint
Camera Trigger
Range Finder
Fence
Acro Trainer
Turn on automatic leveling in the ACRO flight mode.
Sprayer
Turn on the crop sprayer when the switch is pulled high.
Gripper
Parachute Enable
Parachute Release
Parachute 3Pos
Mission Reset
Reset AUTO to run the first mission command in the command list.
AttCon Feed Forward
AttCon Accel Limits
Retract Mount1
Move the camera mount to its retracted position.
Retract Mount2
Move the camera mount to its retracted position.
Relay 1 On/Off
Landing Gear
Deploys or Retracts Landing Gear.
Lost Vehicle Alarm
Plays the lost copter alarm through the buzzer.
Emergency Stop Motors
Stops motors immediately (video).
Motor Interlock
Brake
Relay2 On/Off
Relay3 On/Off
Relay4 On/Off
Throw
ADSB-Avoidance
Precision Loiter
Object Avoidance
Arm/Disarm(4.1 and earlier)
Option
Description
Inverted Flight
Winch Enable
Winch Control
RC Override Enable
Learn Cruise
Clear Waypoints
Clears currently loaded mission waypoints.
Compass Learn
Sailboat Tack
Reverse Throttle
GPS Disable
Simulates GPS failure by disabling GPS.
Relay 5 On/Off
Relay 6 On/Off
Sailboat Motor 3Pos Switch
Surface Tracking Up/Down
Standby
RunCam Control
RunCam OSD Control
VISO Align
Aligns external Visual Odometry with current autopilot AHRS.
Disarm
Q_Assist 3Pos SW
ZigZag Mode Auto Enable
AIRMODE(not a flight mode)
Enables and disables AIRMODE feature. See AirMode.
Generator
Mode control for Richenpower Hybrid Power Generator.
Non Auto Terrain Follow Disable
Disables Terrain Following in CRUISE and FBWB modes.
CROW Mode Switch
Selects between different CROW aileron operating modes.
Soaring Enable
Enables Soaring function operating modes.
Force Flare
EKF Source Set
Airspeed Ratio Calibrate
VTX Power
FBWA_TAILDRAGGER
MODE_SWITCH_RESET
Forces mode switch to be re-read.
WindVane home direction offset
Camera Mode Toggle
Trigger EKF lane switch
Attempts to force an EKF lane switch.
Trigger EKF Yaw reset
Force EKF Yaw reset.
GPS Disable Yaw
Disables yaw for testing (advanced users only!).
Disable Airspeed Use
Forces Airspeed Use to be disabled for testing in the air.
Enable Autotuning
Loweheiser Starter
Enable starter on Loweheiser generator.
SwitchExternalAHRS
SIMPLE mode heading reset
ARM/DISARM (4.2 and higher)
ARM/DISARM with AIRMODE on
TRIM RC/SERVO Save
Torqeedo Error Clear
Clears error condition in Torqeedo motor controller.
Force FBWA as Long FS Action
Optflow Calibration
Enables calibration of optical flow parameters.
Force Flying
WeatherVane Enable
Enables or disables weathervaning in Quadplane VTOL modes.
Turbine Start (Heli)
Auto Throttle Notch Setup
Mount Yaw Lock
Pause Streaming Logging
ARM/Motor Emergency Stop
Camera Record Video
Controls video recording on some cameras/mounts.
Camera Zoom
Controls camera zoom on some cameras/mounts.
Camera Manual Focus
Changes manual focus on some cameras/mounts.
Camera AutoFocus
Controls autofocus on some cameras/mounts.
Compass Calibration
Battery MPPT Enable
Enable the Packet Digital MPPT solar panel power monitor
Plane AUTO Mode Landing Abort
Camera Image Tracking
Activate Camera Image Tracking (only supported by ViewPro camera gimbals).
Camera Lens
Select the active camera lens (only supported by ViewPro camera gimbals).
VTOL Fwd Throttle disable
Overrides use of forward throttle in VTOL modes.
Mount LRF Enable
Enable(switch high) ranging updates.
FlightMode Pause
In Guided/Auto modes, pauses mission.
ICEngine start / stop
Controls ICE engine starter output ICE engines.
Autotune_test_gains
After autotune,allows selecting tune(high) or pretune gains.
VTOL QuickTune
Autotunes QuadPlane VTOL PIDs, see VTOL QUICKTUNE.
AHRS AutoTrim
Auto Trim for Copter, see AutoTrim.
System ID
Mount RP Lock
Mount POI Lock
ROLL Input
ROLL input channel. (replaces RCMAP).
PITCH Input
PITCH input channel. (replaces RCMAP).
THROTTLE Input
THROTTLE input channel. (replaces RCMAP).
YAW Input
YAW input channel (replaces RCMAP).
Mainsail
SERVOx_FUNCTION= 89) instead of being set fromthe Throttle Input channel (useful if it has an auxiliary motorusing that input). See Sailboat Configuration and Setup formore information about the main sail setup.Flaps
Forward Throttle
Airbrakes
Controls deployment of Airbrakes.
Walking Robot Height
Input channel for Walking Robot Height. See Walking Robots.
Mount1 Roll
1st camera gimbal’s roll control.
Mount1 Pitch
1st camera gimbal’s pitch control.
Mount1 Yaw
1st camera gimbal’s yaw control.
Mount2 Roll
2nd camera gimbal’s roll control.
Mount2 Pitch
2nd camera gimbal’s pitch control.
Mount2 Yaw
2nd camera gimbal’s yaw control.
Transmitter Tuning Channel
Copter tuning knob channel, see Transmitter Based Tuning.
Scripting RC channels
Allows reading a dedicated RC channel for script inputs.
Check the channel range¶
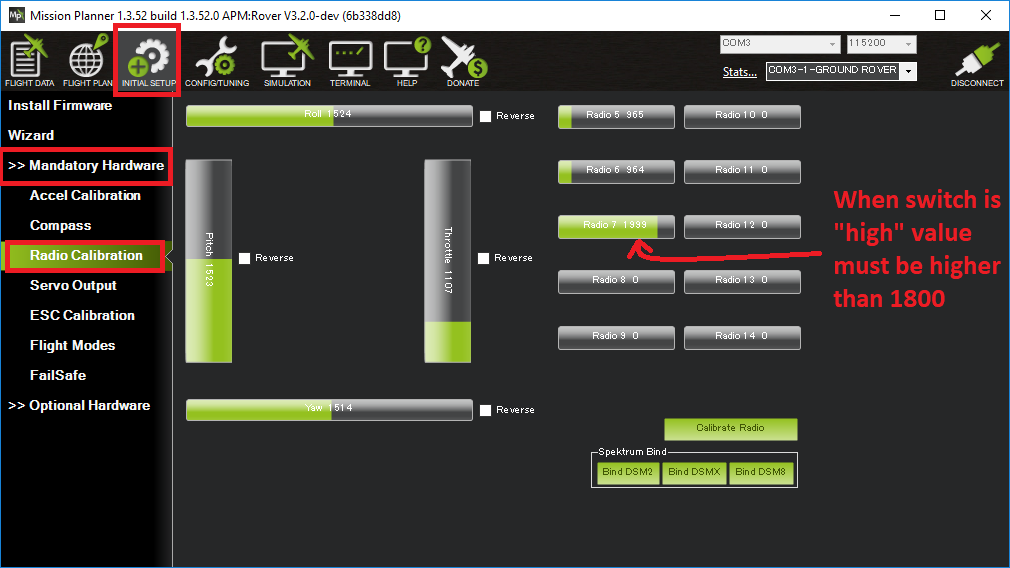
The configured feature will be triggered when the auxiliary switch’s PWM value becomes higher than 1800. It will be deactivated when the value falls below 1200.
You can check the PWM value sent from the transmitter when the switch is high and low using the Mission Planner’s Initial Setup >> Mandatory Hardware >> Radio Calibration screen. If it does not climb higher than 1800 or lower than 1200, it is best to adjust the servo endpoints in the transmitter.