Tuning Speed and Throttle¶
This page describes how a Rover’s speed and throttle controls can be tuned. In general it is best to tune this controller before moving on to the steering controllers.
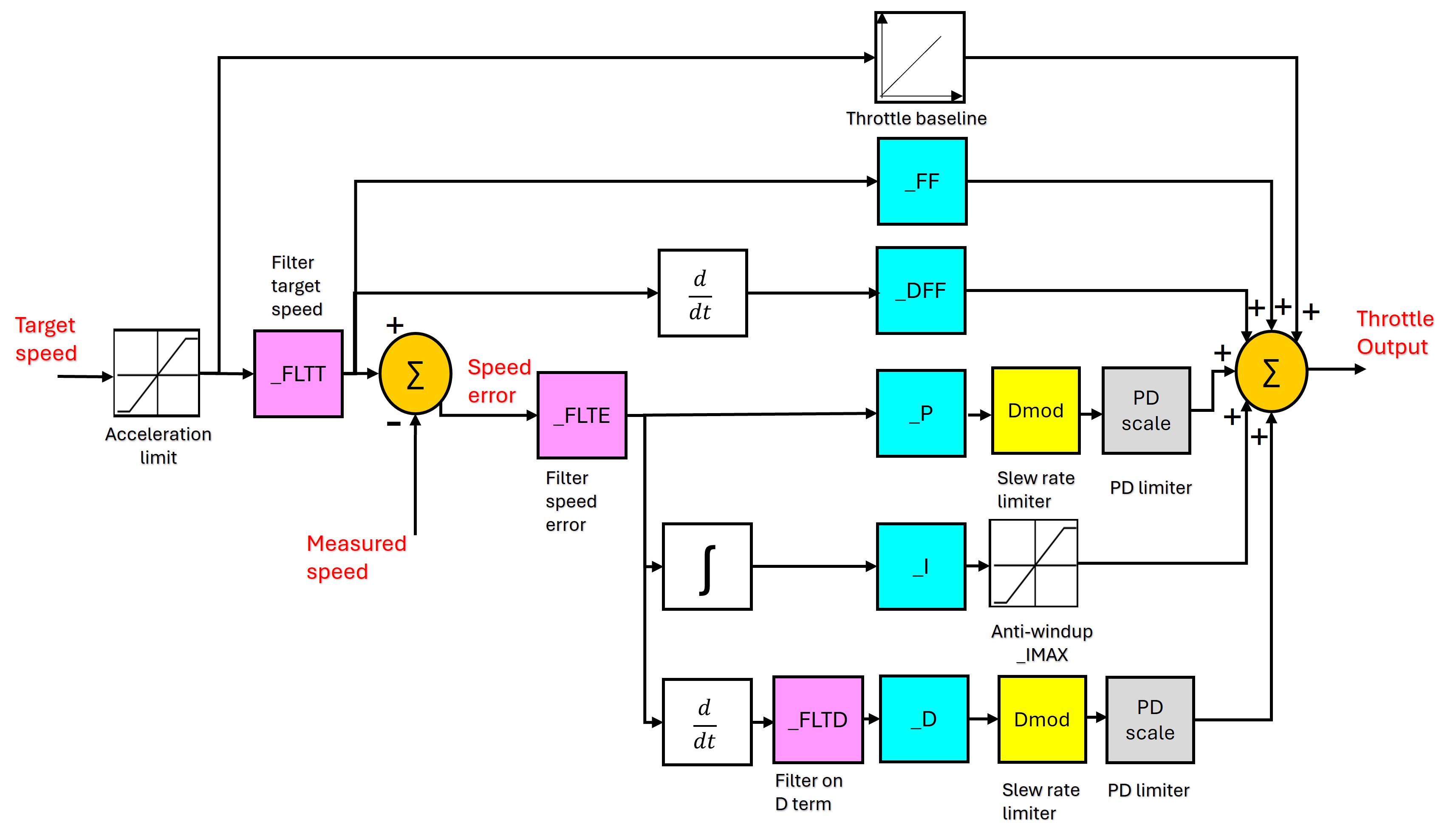
Controller Diagram¶
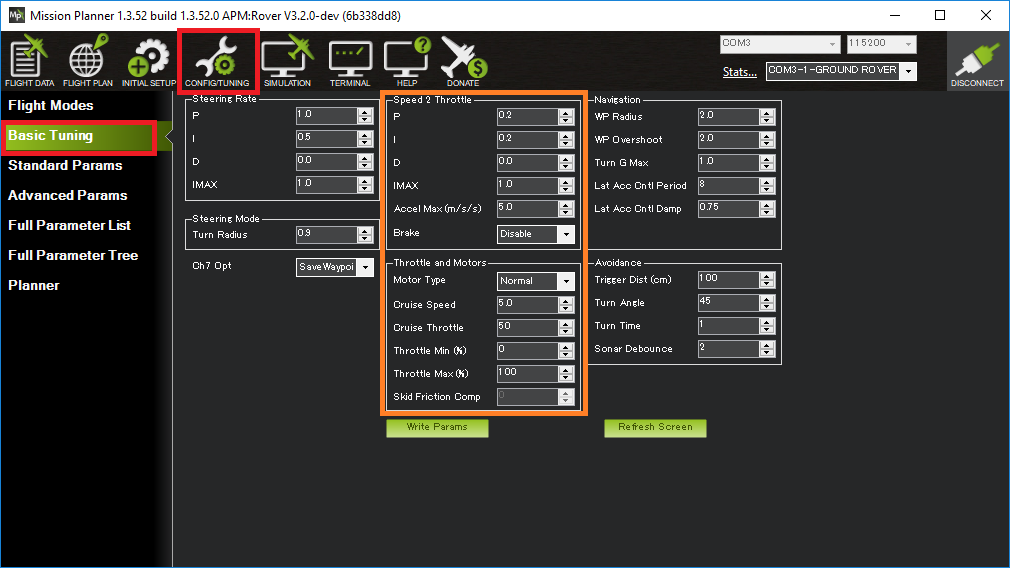
Cruise Throttle and Cruise Speed (Throttle Baseline)¶
The CRUISE_THROTTLE and CRUISE_SPEED parameters set the baseline throttle output used by the Desired-Speed-to-Throttle controller. It is important that these two values are reasonable and consistent with each other meaning that the CRUISE_THROTTLE value (expressed as a percentage) should be close to the throttle required to achieve the CRUISE_SPEED (expressed in m/s).
The easiest way to set these parameters is to:
Set the Auxiliary Function Switch to “Learn Cruise Speed”
Arm the vehicle and switch to Manual
Drive the vehicle at between 50% and 80% throttle
Move the aux function switch to the high position for a few seconds and then back down to the low position
Check the ground station for a message like, “Cruise Learned: Thr:XX Speed:YY” which confirms CRUISE_SPEED and CRUISE_THROTTLE have been updated
Desired Speed to Throttle PID Tuning¶
The Desired-Speed-to-Throttle controller attempts to achieve the desired speed (set by the pilot or autopilot) using a PID controller. All modes except Hold and Manual use this controller.
The P, I and D gains for this controller are held in ATC_SPEED_P, ATC_SPEED_I and ATC_SPEED_D parameters respectively. ATC_SPEED_FF should be left at zero.
Recommended steps for tuning this controller are:
Connect the ground station to the vehicle using a telemetry radio
Set GCS_PID_MASK to 2 (Throttle) to send PID information to the ground station
On the ground station graph the “piddesired” and “pidachieved” values. If using Mission Planner, Open the Flight Data screen, check the “Tuning” checkbox (bottom middle), double click on the graph and select “pidachieved”, “piddesired”
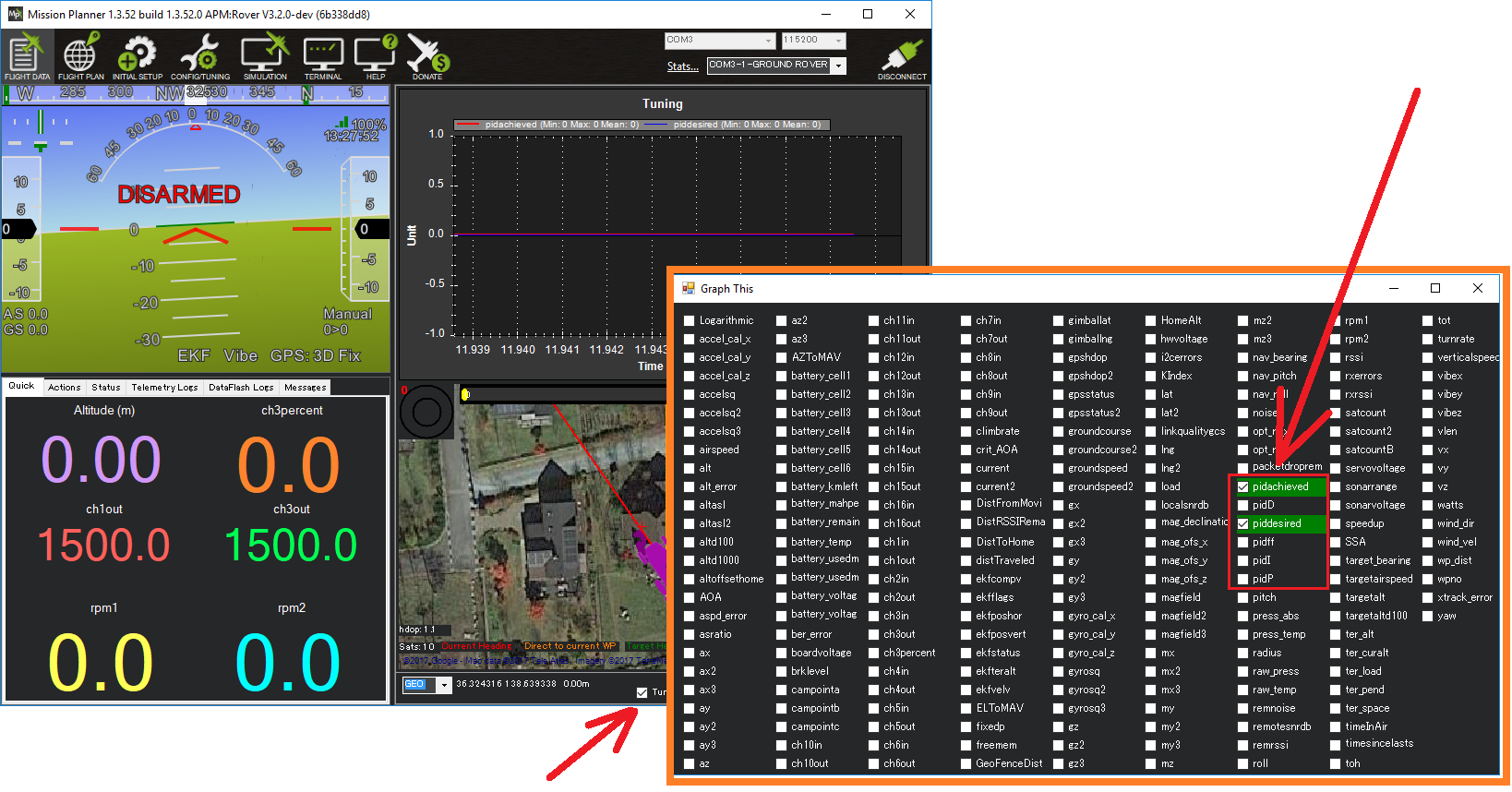
Drive the vehicle at various speeds in Acro mode and compare how well pidachieved follows piddesired
Adjust ATC_SPEED_P, ATC_SPEED_I up or down so that piddesired follows pidachieved
The P gain is the most important and should be tuned first. If the vehicle’s speed is jerky and unstable then this parameter should be reduced. If the vehicle is slow to get up to speed, this parameter should be increased.
The I gain corrects for long-term error. If the vehicle never achieves the desired speed, then this parameter should be increased. If the vehicle’s speed is slowly oscillating between too fast and too slow, this parameter should be reduced. I should normally be lower than P.
The D gain is meant to stabilize the output by fighting against short-term changes in speed. This can be left at zero.
The FF gain should be left at zero because the CRUISE_THROTTLE and CRUISE_SPEED are used to calculate a base throttle output which removes the need for feed-forward.
Acceleration Limit¶
Although less important than other tuning values, the ATC_ACCEL_MAX and ATC_DECEL_MAX parameters should be set to match the vehicle’s physical limits. This helps the speed controller avoid attempting impossible accelerations and reduces overshoot.
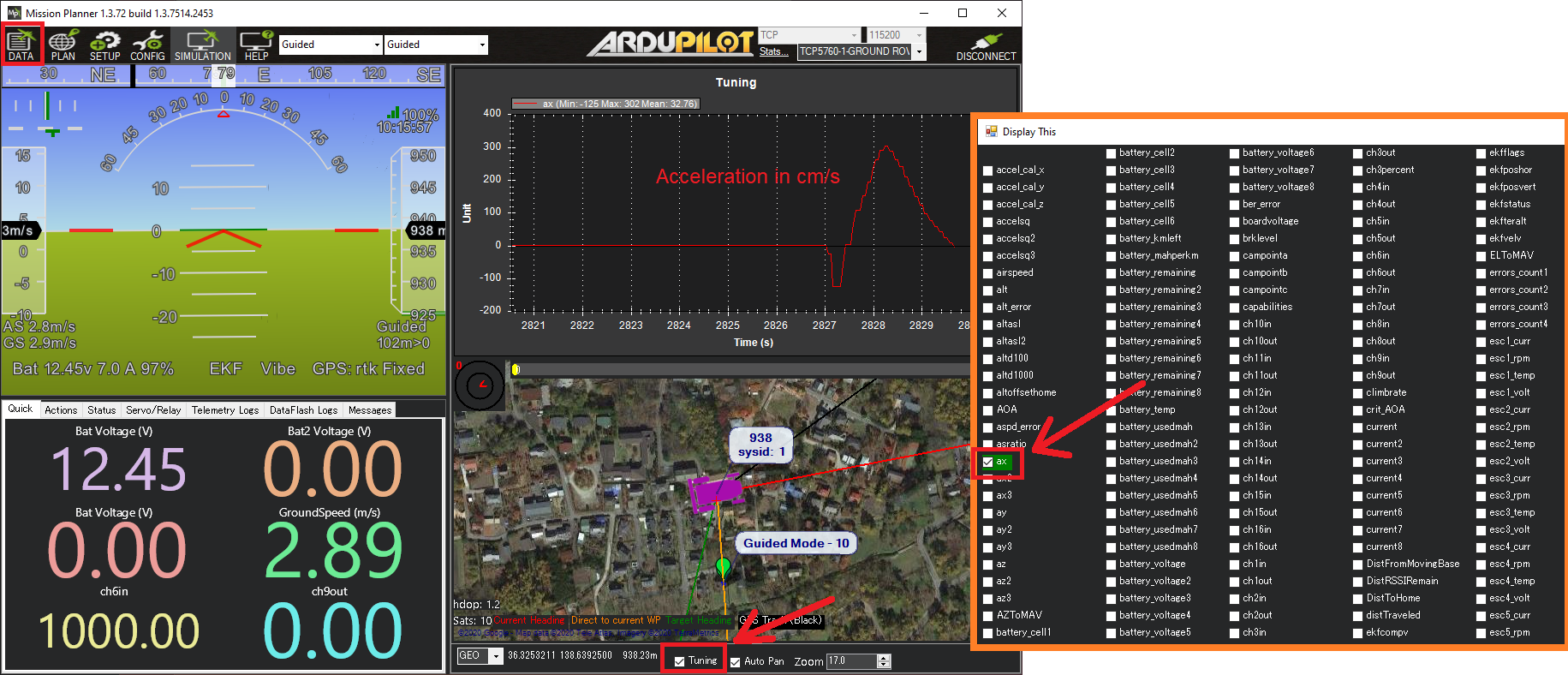
Use the ground station to view the forward-back (aka x-axis) accelerations in real-time. If using Mission Planner open the Flight Data screen, check the “Tuning” checkbox (bottom middle), double click on the graph and select “ax”. Note that the values are in cm/s/s so they should be divided by 100 to get m/s/s.
Drive the vehicle in Manual mode, apply full throttle to accelerate from stopped to full speed
Use the displayed accelerations as a guide to set the ATC_ACCEL_MAX and ATC_DECEL_MAX parameters. Note that the values displayed may be in cm/s/s while the parameter is in m/s/s. If the vehicles acceleration and deceleration are similar ATC_DECEL_MAX can be left as zero
Drive the vehicle in Acro mode to test the vehicle’s accelerations are smooth and that decelerations are not too laggy
Throttle Slew¶
The MOT_SLEWRATE parameter can be used to limit how quickly the throttle output can change.
a value of 100 allows the throttle output to change over its full range in one second
a value of zero disables the limit