Ethernet / Network Setup¶
ArduPilot 4.5 (and higher) provides a network interface framework to allow local and wide-area network connections. Several later generation autopilots, like Pixhawk6X and CubePilot CubeRed, provide Ethernet MAC interfaces, which allows ArduPilot to connect to vehicle peripherals, data servers, and even the wide area network via IP using transport layer UDP or TCP protocols.
In addition, autopilots with H7 based processors can connect to Ethernet over a serial port using PPP (Point-to-Point Protocol), a PPP to Ethernet Adapter and a custom firmware build. See the PPP Configuration section below for more details.
Currently, hooks into the normal serial manager within ArduPilot now allow serial protocols not only to be connected to the autopilot via the normal UART connections, but also via network connections. These can be used either with Etnernet or PPP interfaces.
In addition, LUA Scripting bindings allow the autopilot to run network server type applications via LUA scripts. A web server LUA example is available as an applet that allows faster log downloads, as well as vehicle/system status data to be presented.
For peripherals with a network interface ArduPilot has AP_Periph firmware that allows the easy development of network peripheral devices using the peripheral’s Serial or DroneCAN interfaces to the peripheral device and an easily set up means to pass those devices’ data to the autopilot over the network.
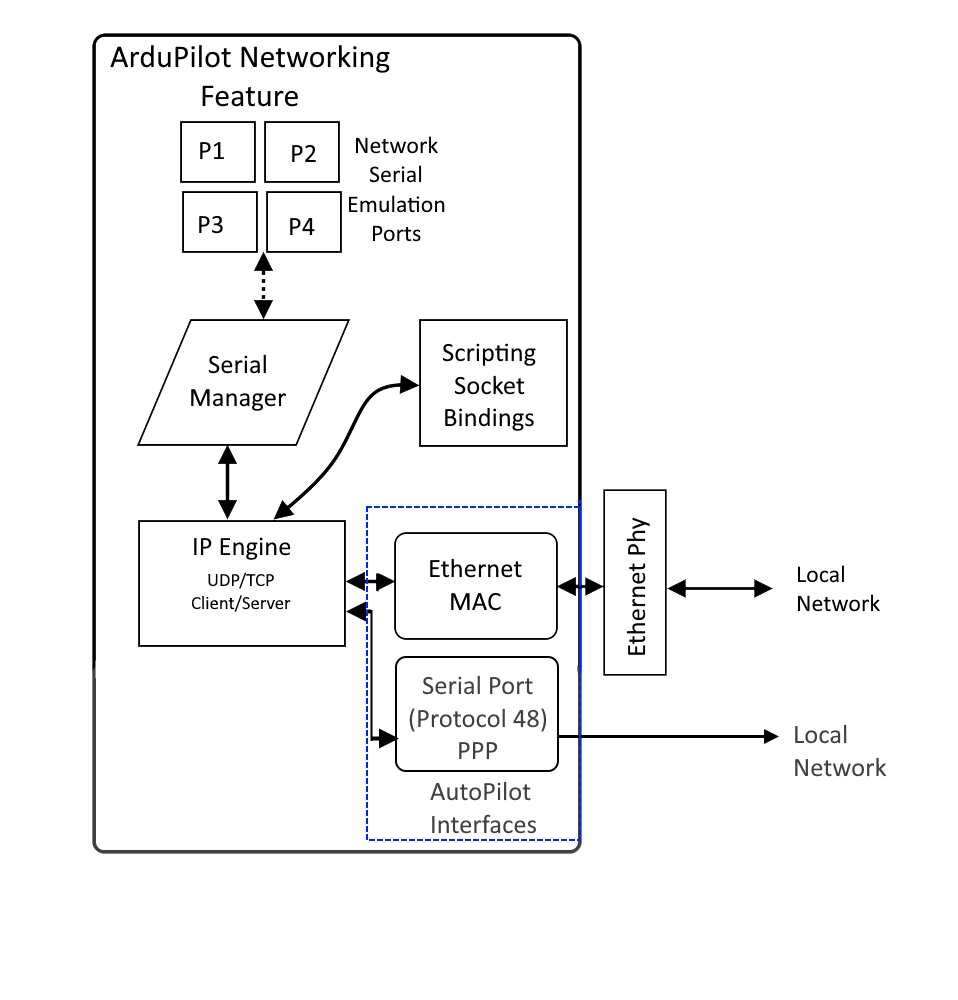
ArduPilot Network Framework Overview¶
ArduPilot provides a NET manager facility that provides the IP protocol engine, as well as UDP and TCP transport layer engines. Four configurable IP ports are available, and each one can be a UDP or TCP, Client or Server. Data flow to/from these ports can be used by the autopilot as if the data streams were those of a:
A serial device supported by ArduPilot (ie. Rangefinder, Gimbal, serial ESC, etc.)
A MAVLink connection to another vehicle or GCS
In addition, LUA Scripting running on an autopilot can access these data ports.
Configuration¶
NET_ENABLE must be set to “1” and autopilot rebooted in order to see the network parameters:
Ethernet MAC Configuration¶
If the autopilot has an Ethernet MAC the following parameters apply. This is the global 6 byte MAC address. The default is automatically generated from the autopilot’s CPU unique id, but can be changed if desired.
Autopilot IP address¶
The following parameters holds the autopilot’s 4 byte IP address. It defaults to 192.168.144.14
NET_IPADDR0 (e.g. 192)
NET_IPADDR1 (e.g. 168)
NET_IPADDR2 (e.g. 144)
NET_IPADDR3 (e.g. 14)
These can be dynamically assigned if the network has a DHCP server by enabling ArduPilot’s DHCP client using the NET_DHCP parameter, or manually set as desired.
Subnet Mask and Gateway¶
The subnet mask limits the IP addresses that the autopilot may directly communicate with.
NET_NETMASK is the number of leading bits set in the subnet mask. For example, if set to 24 (the default) then the subnet mask is 255.255.255.0.
The gateway IP address is used for routing when communicating with IP addresses out of the local subnet defined by NET_NETMASK. Any destination IPs that are outside the masked subnet range will be sent to the gateway’s MAC address with the final destinations IP address. The default is 192.168.144.1.
NET_GWADDR0 (e.g. 192)
NET_GWADDR1 (e.g. 168)
NET_GWADDR2 (e.g. 144)
NET_GWADDR3 (e.g. 1)
PPP Configuration¶
This feature allows any H7 cpu-based autopilot to connect to networks via a Serial port using PPP. This can be to a serial PPP device or to an PPP to Ethernet Adapter.
Note
this cannot be used with autopilots having a built-in Ethernet MAC. Only one network connection per autopilot is allowed currently. Also, only one serial port on the autopilot can be configured for PPP.
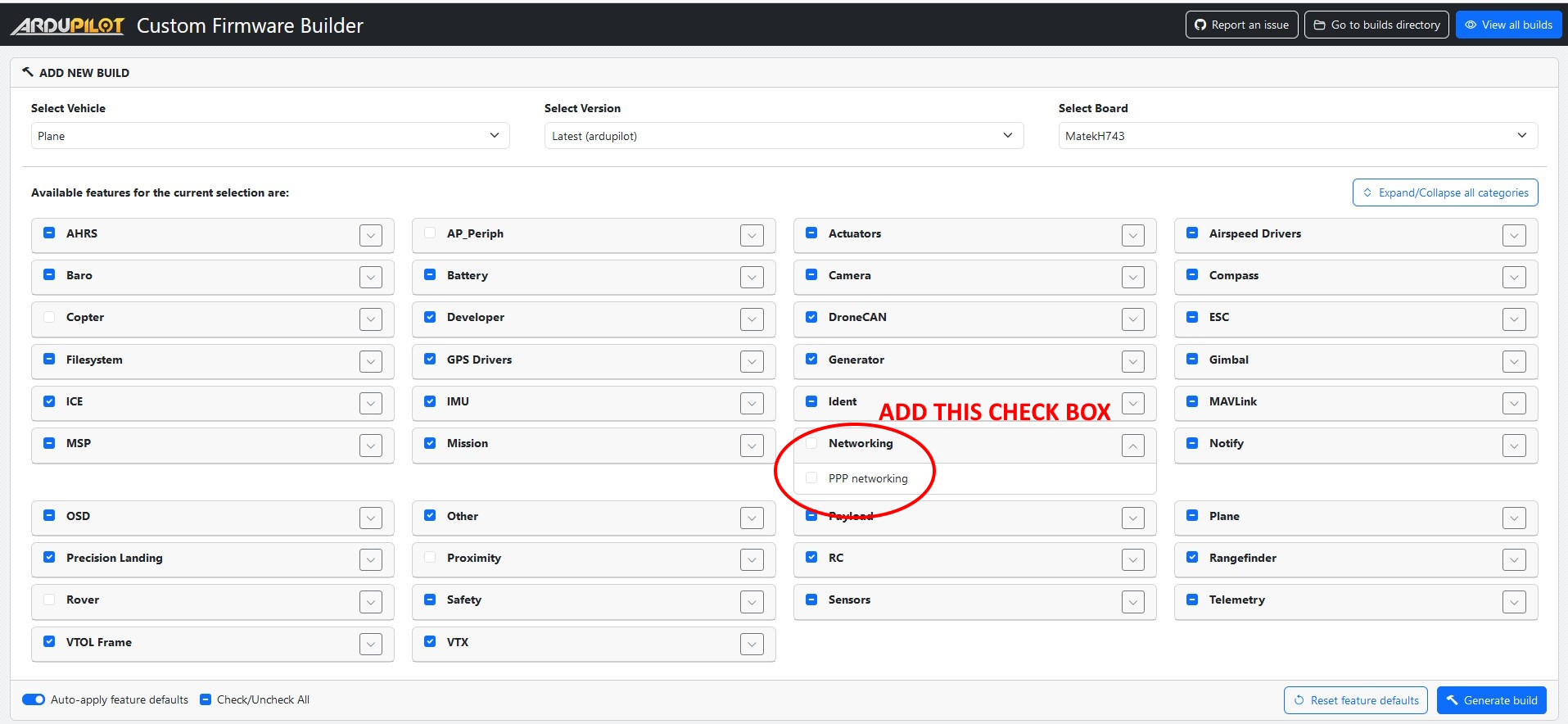
To enable this feature, it first must be present in the autopilot firmware. This can be done using the Custom Firmware Build Server or by building the code locally using the “--enable-PPP” waf configuration option (See Building the code)
Connect one of the H7 based autopilot’s serial ports to the ethernet switch’s or Ethernet-to-PPP-adapter’s USART port. For optimum performance a serial port with flow control should be used (e.g. normally SERIAL1 or SERIAL2). If a port without flow control if used, the baud rate may be set as high as 921000
Alternatively, any Linux-based computer with a UART (or USB-UART) can be used with the “pppd” software. An example of the command to run this is:
sudo pppd /dev/ttyAMA0 12500000 192.168.144.15:192.168.144.14 crtscts debug noauth nodetach local proxyarp ktune
The above command will take the incoming stream from /dev/ttyAMA0 (at a 12.5M Baudrate) destined for 192.168.144.15 (the local IP of pppd) and defines the remote (the flight controller) as 192.168.144.14.
To configure a serial port for PPP (Serial2 is used in this example):
set SERIAL2_PROTOCOL = 48 (PPP) requires a reboot to take effect.
set SERIAL2_BAUD = 12500000 (12.5MBaud)
Networking Options¶
Several setup options are available for networking operation via the NET_OPTIONS bitmask parameter:
Bit |
Function |
|---|---|
0 |
EnablePPP Ethernet gateway |
1 |
Enable CAN1 multicast endpoint |
2 |
Enable CAN2 multicast endpoint |
3 |
Enable CAN1 multicast bridged |
4 |
Enable CAN2 multicast bridged |
5 |
DisablePPPTimeout |
6 |
DisablePPPEchoLimit |
ArduPilot Port Configuration¶
These parameters apply for either Ethernet or PPP data link connections to the network. Parameters for each of the four logical ports per network physical interface (example shown only for Port 1):
NET_P1_TYPE: Type can be disabled (0), UDP Client (1), UDP Server (2), TCP Client (3), or TCP Server(4). For the two client types a valid destination IP address must be set. For the two server types either 0.0.0.0 or the autopilot’s local IP address can be used. The UDP client type will use broadcast if the IP is set to 255.255.255.255 and will use UDP multicast if the IP is in the multicast address range. A reboot is required to see the following parameters once the TYPE is set.
NET_P1_IP0, NET_P1_IP1, NET_P1_IP2, NET_P1_IP3:IP address for outgoing packets from Clients. Can be 0.0.0.0 or the autopilot’s IP address for Servers. A reboot is required after changing.
NET_P1_PORT: This is the TCP or UDP port number. Reboot required after changing.
NET_P1_PROTOCOL: This registers this port with the ArduPilot Serial Manager as having a device attached which uses the specified protocol. This allows ArduPilot to use the data as if it had come from a UART attached device or connection. A reboot is required after changing.
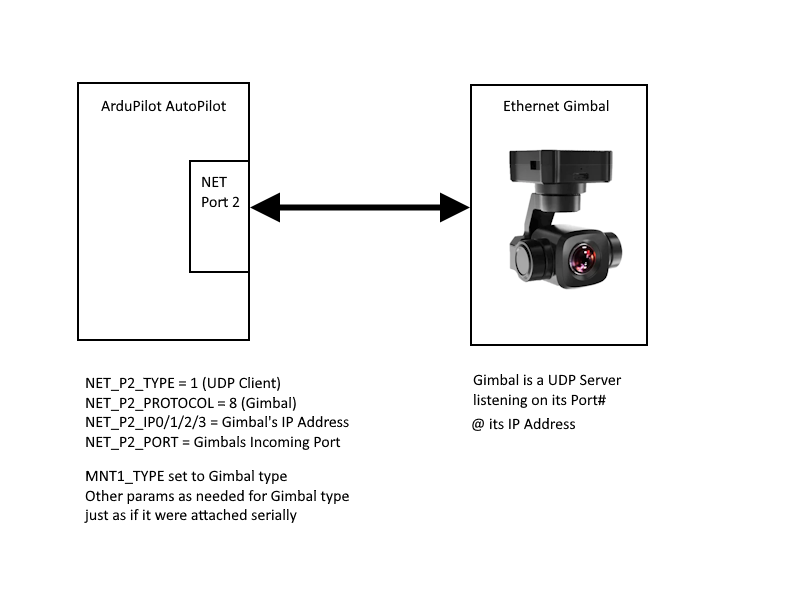
The figure below shows a typical single device setup for an Ethernet gimbal.
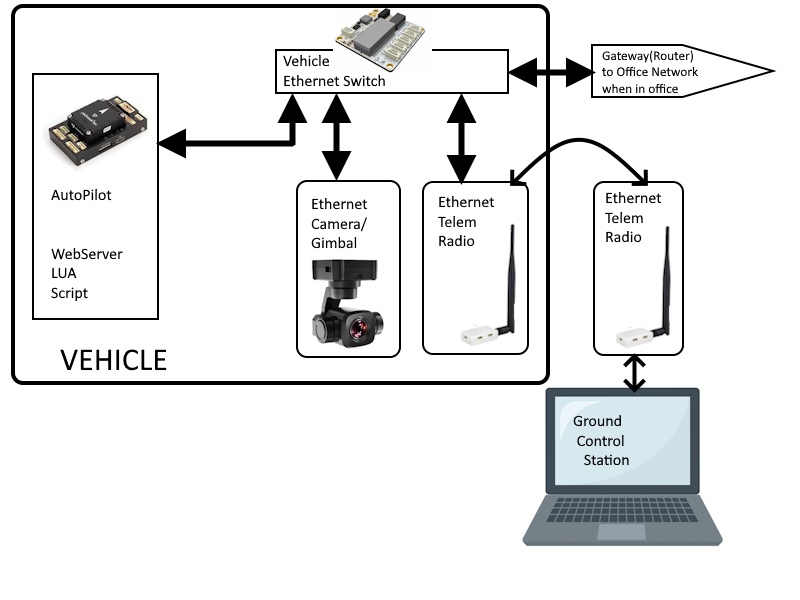
The figure below shows a typical vehicle system with multiple peripherals and an optional ground-based connection to a factory network for data retrieval and vehicle setup.
Server or Client?¶
The choice of client or server is determined by the capabilities of the device being connected. If it is a TCP server, then ArduPilot’s port should be a TCP Client. If its a UDP Client, then ArduPilot would be a UDP Server.
In general if a device is a controllable object to the autopilot, it would be a server, always listening for commands (ESC, Gimbal,etc.). If a continuous data stream (like an airspeed sensor), it would probably be a client, able to send data without inquiry.
Scripting¶
Network access to LUA scripts is provided with several socket style bindings (search for “socket”) that allows the script to connect and manage UDP or TCP data flow to the network from the script.
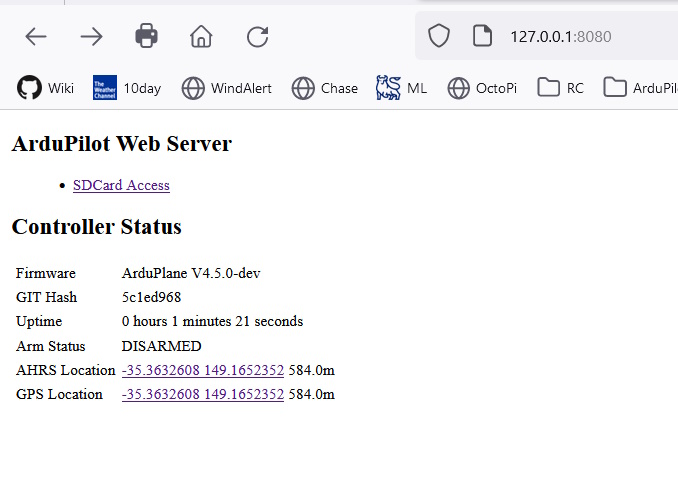
An example script implementing a simple web server application on the autopilot which allows access to the SD card (for rapid log downloading), and access to autopilot state(arming and GPS/AHRS location in this example) is available here and its readme file here
Running the Webserver Script Under SITL¶
run SITL
enable scripting (SCR_ENABLE = 1), reboot SITL
set SCR_VM_I_COUNT = 1000000, reboot SITL
connect local webrowser to “http://127.0.0.1:8080” (not types as shown to avoid https)
Resulting web page
Connecting to Webserver via Network Attached Autopilot¶
In order to connect an autopilot running the webserver to the local network to allow other PCs to access the server:
connect autopilot to the local network (directly or via Ethernet switch)
make sure
NET_IPADDRis an address within the local network range or use the network DHCP server to set it if using the Ethernet interface. For PPP configurations the connected PPP access peripheral should be already setup for network operation as required, and its PPP daemon should have an arp proxy runniing.connect local webrowser to “http://<NET_IPADDR>:8080” (note: type exactly as shown… “https://” will not work)
Cable Adapters, Cabling, and Wiring¶
Most Ethernet devices are interconnected with CAT5 (or higher) cables with RJ-45 connectors. These connectors are obviously too bulky for use on an autopilot or vehicle Ethernet switches. Instead 4 or 5 pin JST-GH or Picoblade connectors are used. See the Ethernet adapters page for a list of known devices
Using full CAT5 cables to interconnect vehicle components for longer runs may be required, but runs 1-2 meters or less can be done with two twisted pairs of 22-24 AWG wire. Runs from autopilot to switch and to peripherals may all be implemented with short twisted pair runs and JST-GH/Picoblade connectors.
Example Ethernet Connected Vehicle System¶
Network Capture¶
In ArduPilot 4.7.x and later you can enable network capture to capture on-target network traffic for troubleshooting Ethernet and PPP links.