BLHeli32,AM32, and BLHeli_S ESCs¶
Warning
if you are using BLHeli32 ESCs, be sure to update to the latest BLHeliSuite32 Rev32.10.0.0 firmware, to avoid surprise uncontrollable motor starts due to a BLHel32 firmware bug!
The BLHeli firmware and configuration applications were developed to allow the configuration of ESCs and provide additional features. ESCs with this firmware allow configuring timing, motor direction, LEDs, motor drive frequency, etc. Before attempting to use BLHeli please follow the DShot setup instructions.
Depending on the ESC, BLHeli/BLHeli_S/BLHeli32/AM32 provides the following features:
Pass-Through support in ArduPilot allows the BLHeliSuite, AM32 and other ESC configurators to be used to configure the ESCs while remaining connected to the autopilot via USB cable.
Reversible DShot (aka 3D mode) allows the motor to be spun in either direction
Bi-directional DShot allows the ESCs to send RPM back to the autopilot without the need for an additional telemetry connection
ESC Telemetry allows the ESCs to send RPM, voltage and current information back to the autopilot so that it can be logged, viewed in real-time or even allow the removal of a battery monitor
“BLHeli” (and now AM32) covers multiple (sometimes competing) projects providing ESCs firmware and accompanying configuration software
BLHeli was the original open source software that is no longer maintained and is not available on modern ESCs
BLHeli32is closed source and based on 32bit ARM MCUs and development and licensing was terminated in 2024. All modern BLHeli ESCs use BLHeli32 but will be replaced with AM32 in the future.
AM32 is open source with the same features as BLHeli32 before it became unavailable for new designs but continues to evolve.
BLHeli_S is open source and 16bit. This is no longer actively maintained but the last published version, 16.7, is installed by default on “BLHeli_S” ESCs when shipped from the factory
BLHeli_S JESC is paid, closed source software and 16bit allowing it to run on lower end hardware
BLHeli_S BlueJay is free, open source software and 16bit
Web-based ESC Configurator for the above (due to timing variations, being internet based, reliability of connection thru ArduPilot is variable).
Note
firmware 4.5 or later required to use this ESC Configurator tool.
Pass-Through Support¶
Note
This feature is only available on NON IOMCU outputs. Autopilots which have an IOMCU co-processsor (usually marked as having “MAIN” outputs from the IOMCU and “AUX” outputs from the main cpu) will not pass-through on those outputs. Use this feature on “AUX” or “FMU” outputs with DShot capability. For Plane, Rover and Sub, be mindful that using AUX outputs for vehicle-critical controls removes the benefits of an IOMCU. For Copter, IOMCU redundancy is not effective since it has no “MANUAL” control mode. For maximum robustness (on Plane which has a manual mode which can be used if the FMU fails), switch your motors to “AUX” or “FMU” only when configuring with passthrough, and move them back to “MAIN” once configuration is complete.
The Pass-Through feature allows BLHeli32, AM32, and BLHeli_S ESCs to be upgraded and configured using the corresponding BLHeliSuite32, AM32 Configurator, or BLHeliSuite application (running on the user’s PC) while the ESCs remain connected to the autopilot. To use this feature please follow these steps
Download and install Linux or Windows AM32 configurator (for use with AM32 ESCs), BLHeliSuite32 (for use with BLHeli32/AM32 ESCs), BLHeliSuite (for BLHeli_S ESC) or JESC configurator (for use with BLHeli_S JESC) on your PC.
Connect your PC to the autopilot using a USB cable and then connect with a ground station (e.g. Mission Planner, QGC).
Disconnect your propellers
Set SERVO_BLH_AUTO to 1 to automatically enable pass-through on all outputs configured as motors (e.g. SERVOx_FUNCTION = “Motor1”, “Motor2”, etc) for multicopters and quadplanes or throttle (e.g. those with SERVOx_FUNCTION set to 70 (“throttle”), 73 (“throttle left”) or 74 (“throttle right”)) on rovers. For most multicopters, quadplanes and rovers this will do the right thing but for planes, set SERVO_BLH_MASK to enable pass-through on the appropriate servo outputs.
If your PC is connected to the autopilot using a telemetry radio (instead of using USB cable as recommended above) set SERVO_BLH_PORT to the autopilot port connected to the telemetry radio. Beware that this is does NOT specify the port used for ESC telemetry feedback to your autopilot!
Plug in the vehicle’s battery to power the ESC’s
If using a safety switch ensure it is pushed (or disabled by setting BRD_SAFETY_DEFLT = 0). (
BRD_SAFETYENABLEin older firmware versions)Disconnect the ground station (but leave the USB cable connected)
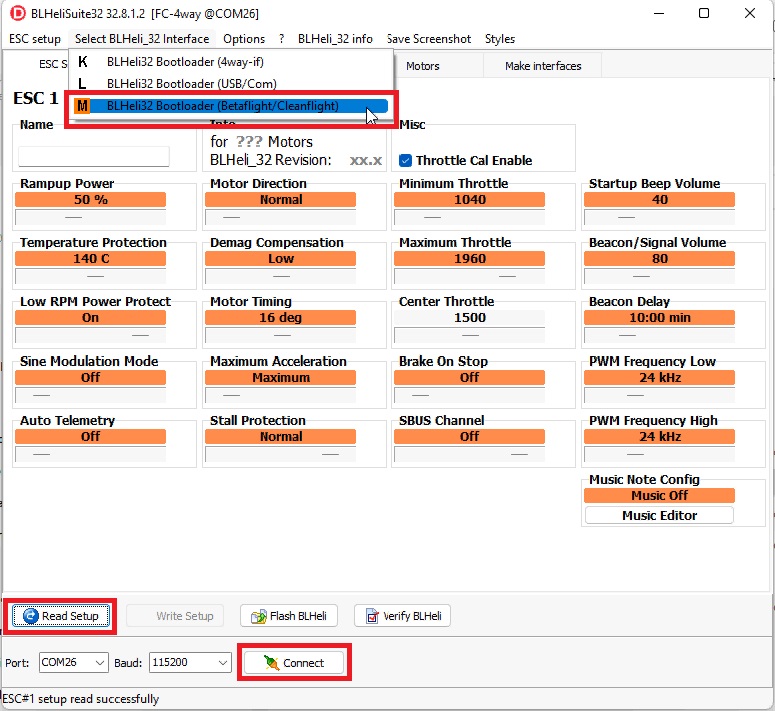
Start the ESC configuration software and connect to the autopilot’s COM port by selecting “BLHeli32/AM32 Bootloader (Betaflight/Cleanflight)” from the interfaces menu. Press “Connect” and “Read Setup”. You should be able to upgrade and configure all connected ESCs
Note
ArduPilot firmware supports the pass-through protocol with up-to-date BLHeli32, AM32 firmware and BLHeliSuite32, or BLHeli_S firmware and BLHeliSuite only.
Warning
For pass-through to function, the autopilot must be configured to use one of the DShot protocols. If you wish to eventually use one of the other protocols (e.g. PWM, OneShot125) that the ESC supports, you may still configure the ESCs using Pass-Through (e.g. change motor directions, set min/max values, etc) but then finally re-configure the autopilot to not use DShot. Once the autopilot and ESCs are rebooted the ESC should auto-detect that the ESCs are no longer using DShot.