Archived: Building for Pixhawk on Windows with Make¶
Warning
ARCHIVED ARTICLE
ArduPilot no longer supports make.
This article shows how to build ArduPilot for The Cube, Pixhawk, PixRacer on Windows with Make. These instructions assume you have already setup the build environment
Note
The commands for building Pixhawk are (make px4-v2). Building for The Cube is the same except make px4-v3 is used. Building for Pixracer is the same except make px4-v4 is used. For the older (obsolete) PX4 use make px4-v1.
Build instructions¶
Open the PX4Console and navigate to the target vehicle directory:
Start the PX4Console. This can be found under Start | All Programs | PX4 Toolchain (Windows 7 machine) or you can directly run C:\px4\toolchain\msys\1.0\px4_console.bat
Navigate to the vehicle-specific ArduPilot directory in the PX4Console. For example, to build Copter, navigate to:
cd /c/Users/<username>/Documents/GitHub/ardupilot/ArduCopter
Build the firmware by entering one of the following commands:
|
Build the Pixhawk firmware for a quad |
|
Build The Cube firmware for a quad |
|
Build the PixRacer firmware for quad |
|
Build both PX4 (obsolete) and PixHawk firmware for a quadcopter |
|
“clean” the ardupilot directory |
|
“clean” the PX4Firmware and PX4NuttX directories so the next build will completely rebuild them |
|
“clean” .d and .o files from the PX4Firmware and PX4NuttX directories. faster but less complete rebuild compared to “px4-clean” |
|
Build and upload the Pixhawk firmware for a quad (i.e. no need to upload using a ground station) |
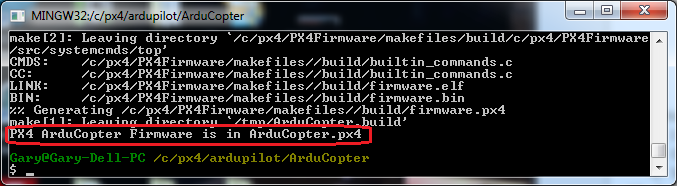
The firmware will be created in the ArduCopter directory with the .px4 file extension.
Upload the firmware using the Mission Planner Initial Setup | Install Firmware screen’s Load custom firmware link
Note
ArduPilot imports addition projects (PX4Firmware, PX4NuttX, uavcan) as git submodules when you build the project. If you built the project before the change to submodules you may get errors. See Git Submodules for troubleshooting information.
Note
You can ignore any messages regarding PX4Firmware and PX4Nuttx hashes. Those are useful labels for developers but optional and sometimes the build system can’t find them on your system. As long as it says “Firmware is in..” followed by a .px4 file then you have a successful build which you can safely load onto your aircraft.
Hints for speeding up compile time¶
Anti virus protection is likely to slow the compile times especially for PX4 so it is recommended that the folders containing the ArduPilot source code is excluded from your virus protections real-time scan.
The first scan after a make px4-clean will be very slow as it
rebuilds everything