Thrust Compensation of Barometer¶
Note
this features is not included on most ArduPilot standard firmware builds. Use the custom firmware build server to create a firmware that includes it.
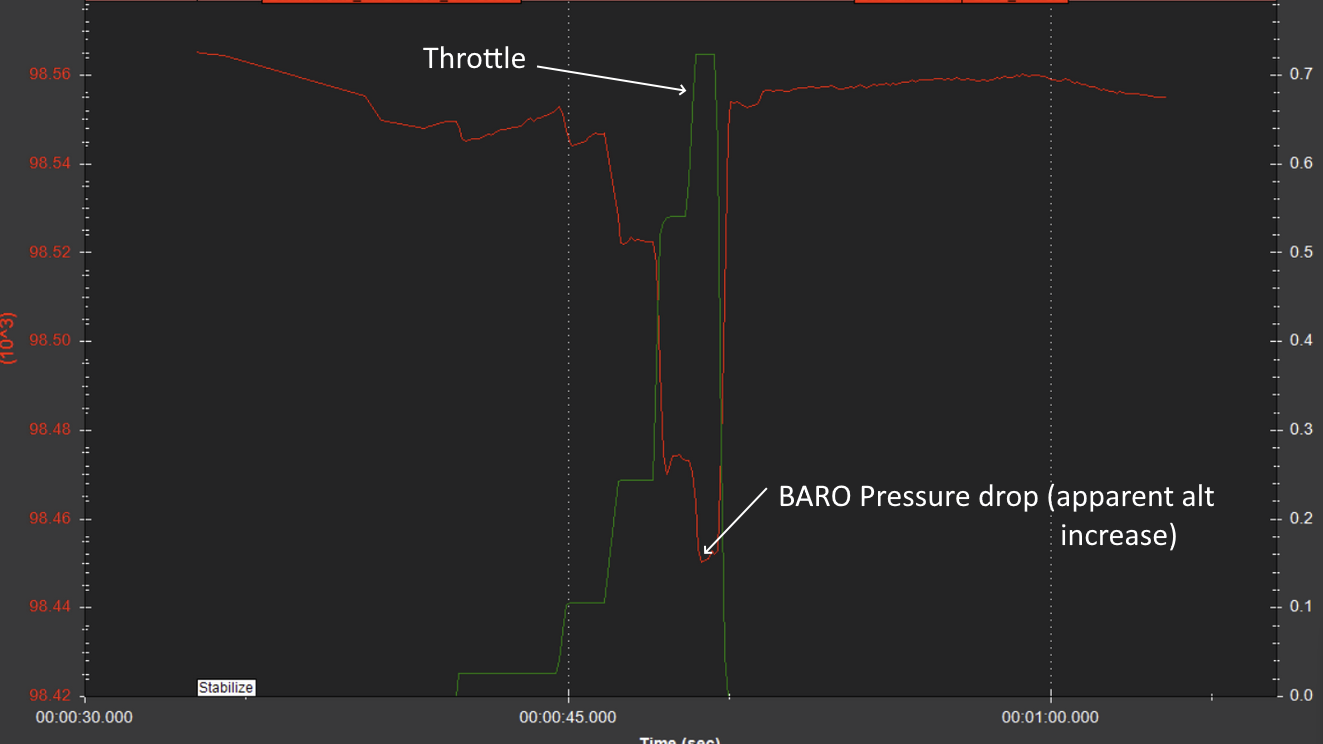
On very small multirotors, the autopilot’s barometer might be in the prop wash and have its readings impacted by that pressure which will vary with respect to the thrust (Throttle) being produced.
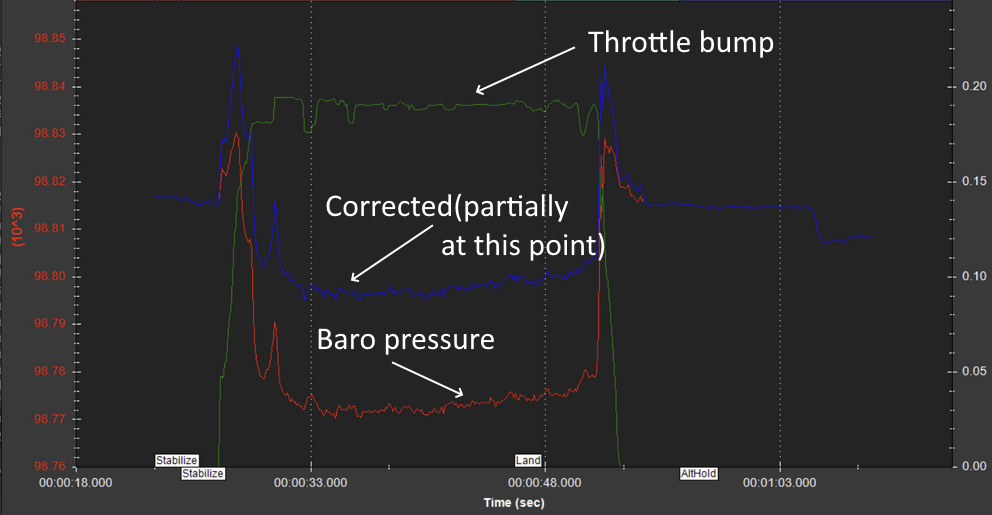
The first barometer (BARO1) can have compensation applied as a linearly varying offset of throttle value to reduce this effect. The BARO1_THST_SCALE parameters determines the magnitude, and sign, of the offset and will need to be experimentally determined for a particular vehicle. Examining the the log messages for BARO1.Press vs BARO1.CPress (compensated atmospheric pressure) can be used for this.