Requesting Data From The Autopilot¶
The ground station or companion computer can request the data it wants (and the rate) using one of the following methods:
Set the
SRx_parameters to cause the autopilot to pro-actively send groups of messages on start-up. This method is easy to set-up for a small number of drones but is not recommended for most applicationsSend REQUEST_DATA_STREAM messages to set the rate for groups of messages
Send a SET_MESSAGE_INTERVAL command (within a COMMAND_LONG message) to precisely control the rate of an individual message. Note this is only supported on ArduPilot 4.0 and higher
Send a REQUEST_MESSAGE command (within a COMMAND_LONG message) to request a single instance of a message. Note this is only supported on ArduPilot 4.0 and higher
Create configuration files stored on the SD card or in ROMFS specifying message stream rates on a per-channel basis
Install a Lua script to set individual messages rates (e.g. Set Message Interval via a Lua script). See “Using a LUA Script” section below.
Note that the stream rates will temporarily be 4 or more times slower than requested while parameters and waypoints are being sent.
More details on the above methods can be found below.
Note
If you find your message rates are reverting to some fixed value after you set them, see the “Rates Reverting to some Fixed value” section at the bottom of this page
Using SRx Parameters¶
Setting the SRx_ parameters (and then rebooting the autopilot) will cause the autopilot to pro-actively send groups of messages to the ground station. This is not the recommended method because the ground station has no way to determine what “x” should be.
Connect to the autopilot with a ground station
Determine which telemetry connection is being used. For example if the ground station is connected to the autopilot’s “Telem1” port (perhaps using a wifi or telemetry radio) then the
SR1_parameters should be modifiedSet the
SRx_parameter to the rate (in Hz) you wish the group of messages to be sent. The exact messages contained in each group can be determined by inspecting the STREAM_xxx arrays in each vehicle’s GCS_Mavlink.cpp file (see here for Copter, Plane, Rover, Sub and AntennaTracker). Below is the list of messages by group for Copter-4.0:SRx_ADSB
SRx_EXT_STAT
SRx_EXTRA1
SRx_EXTRA2
SRx_EXTRA3
SRx_PARAMS - should not be changed
SRx_POSITION
SRx_RAW_CTRL (Not Used)
SRx_RAW_SENS
SRx_RC_CHAN
RC_CHANNELS_RAW (only sent on mavlink1 links)
Using REQUEST_DATA_STREAM¶
Most ground stations including the Mission Planner use this method. See Setting the Datarate in the Mission Planner wiki.
Send a REQUEST_DATA_STREAM message with the following fields
target_system : the MAVLink system id of the vehicle (normally “1”)
target_components : normally “0”
req_stream_id : 0 to 12 corresponding to the group of messages (see MAV_DATA_STREAM). See the “Using SRx Parameters” section above to determine exactly which messages are in each group
req_message_rate : the rate (in hz) of the message
start_stop : “1” to start sending, “0” to stop
Examples
Here are some example commands that can be copy-pasted into MAVProxy (aka SITL) to test this command. Before running these commands enter the following
module load message
Example MAVProxy/SITL Command |
Description |
|---|---|
|
Request sysid:1, compid:0 send sensor data at 5hz |
|
Request sysid:1, compid:0 stop sending sensor data |
|
Request sysid:1, compid:0 send position data at 5hz |
|
Request sysid:1, compid:0 stop sending position data |
Using SET_MESSAGE_INTERVAL¶
This method provides the most precise control and reduces bandwidth requirements (because unnecessary messages are not sent) but requires knowing exactly which messages you require
Send a COMMAND_LONG with the following fields
target_system : the MAVLink system id of the vehicle (normally “1”)
target_components : normally “0”
command: 511 (for MAV_CMD_SET_MESSAGE_INTERVAL)
confirmation: 0
param1: desired MAVLink message’s id (i.e. 33 for GLOBAL_POSITION_INT)
param2: time interval between messages in microseconds (i.e. 100000 for 10hz, 1000000 for 1hz)
param3 to param7: 0 (not used)
Examples
Here are some example commands that can be copy-pasted into MAVProxy (aka SITL) to test this command. Before running these commands enter the following
module load message
Example MAVProxy/SITL Command |
Description |
|---|---|
|
Request GLOBAL_POSITION_INT at 10hz |
|
Request GLOBAL_POSITION_INT at 1hz |
|
Request GLOBAL_POSITION_INT at default rate |
|
Request GLOBAL_POSITION_INT not be sent |
Warning
If the telemetry link is shared (i.e. multiple GCSs or a GCS and a companion computer) there can be conflicting requests. The most common example is the Mission Planner using the REQUEST_DATA_STREAM method while a companion computer uses SET_MESSAGE_INTERVAL method. Mission Planner at least allows turning off the REQUEST_DATA_STREAM requests by setting the rates to “-1” (see Setting the Datarate). MAVProxy users can set streamrate -1.
Using REQUEST_MESSAGE¶
A GCS can poll for a single instance of a message from the autopilot.
Send a COMMAND_LONG with the following fields
target_system : the MAVLink system id of the vehicle (normally “1”)
target_components : normally “0”
command: 512 (for MAV_CMD_REQUEST_MESSAGE)
confirmation: 0
param1: desired MAVLink message’s id (i.e. 33 for GLOBAL_POSITION_INT)
param2: depends on message requested; see that message’s definition for details.
param3 to param7: 0 (not used)
Examples
Here are some example commands that can be copy-pasted into MAVProxy (aka SITL) to test this command. Before running these commands enter the following
module load message
Example MAVProxy/SITL Command |
Description |
|---|---|
|
Request GLOBAL_POSITION_INT be sent once |
Specifying Message Rates in a File¶
At boot ArduPilot will populate the initial message intervals from files found in either ROMFS or in the filesystem.
On ChibiOS-based boards (with more than 1MB of flash) the SD card will be searched for specially-named files in the root directory.
Each mavlink channel is configured in a separate configuration file. The first serial port configured as mavlink is channel 0, the second serial port channel 1 etc.
An example filename is message-intervals-chan0.txt
The format is simple but strict. There are two columns, separated by a single space and both containing numbers. The first number is a mavlink message ID. The second is the message interval, in milliseconds. Each line must be terminated by either carriage-return or a line-feed.
30 50
28 100
29 200
This sample file content will stream ATTITUDE (ID=30) at 20Hz and SCALED_PRESSURE (ID=29) at 5Hz. Message ID 28 is RAW_PRESSURE which ArduPilot does not send - this line will be ignored.
Configuration files can be included in ROMFS (i.e. compiled into the image) by specifying their path in the relevant board’s hwdef file:
ROMFS message-intervals-chan0.txt libraries/AP_HAL_ChibiOS/hwdef/CubeOrange/message-intervals-chan0.txt
The second parameter is a path relative to the ArduPilot checkout’s root directory.
Example use cases of this include locking telemetry rates on boards that can’t run scripting, or before scripting can be run.
Using a Lua Script¶
Download the message_interval.lua Lua script
Open the script in an editor (like Notepad)
Ensure each mavlink message you wish to enable or disable is listed in the “mavlink message ids” (around line 13) and “intervals” array (around line 36)
Upload the script to the autopilot by following these instructions
Restart the autopilot and confirm no errors appear on the ground stations’s Messages tab
Follow the instructions below to ensure the messages are appearing at the desired rate. If the rates are variable, this may be because of a conflict between the Lua script and a GCS, please see the “Rates Reverting to some Fixed value” section below
Checking The Message Rates¶
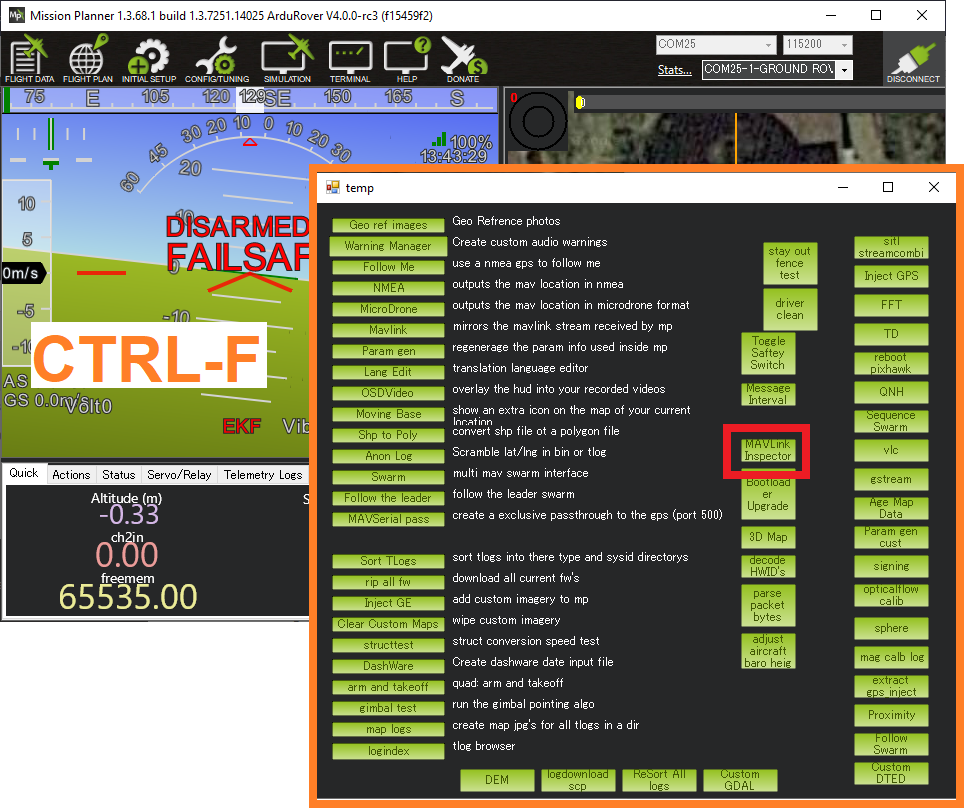
Some ground stations including Mission Planner and QGC include a “MAVLink Inspector” which is useful when checking the update rate of specific messages.
If using Mission Planner:
Press Ctrl-F
Push the “MAVLink Inspector” button
Expand the vehicle and component IDs to see individual messages and their update rate
If using MAVProxy:
module load messagerate
messagerate status
Rates Reverting to some Fixed value¶
If you find the message rates are reverting to some fixed rate (often 4hz) after you set them, it is probably a Ground Control station adjusting the rates.
Most Ground Control Stations have a control to disable this behaviour. For example:
If using MAVProxy type
set streamrate -1into the consoleIf using Mission Planner, open the Config, Planner screen and set the “Telemetry Rates” dropdowns to -1
If using QGroundControl, open Application Settings, Telemetry and move the “Controlled By vehicle” slider to the right
If adjusting the GCS behaviour is impossible, set the appropriate SERIALn_OPTIONS parameter’s bit 12 (“Ignore Streamrate”) to ignore attempts by the GCS to set message rates via streamrate commands. For example if Serial1/Telem1’s rates are being inconveniently adjusted by the GCS, set the SERIAL1_OPTIONS parameter value