MAVLink Routing in ArduPilot¶
ArduPilot (which runs on the flight controller) can route MAVLink messages received on one telemetry port to all other telemetry ports. This is important in cases where there are multiple MAVLink enabled components on the vehicle (i.e. a flight controller and a companion computer) but only a single telemetry connection between the vehicle and the ground station. This page describes how ArduPilot decides which messages should be routed and to which telemetry ports.
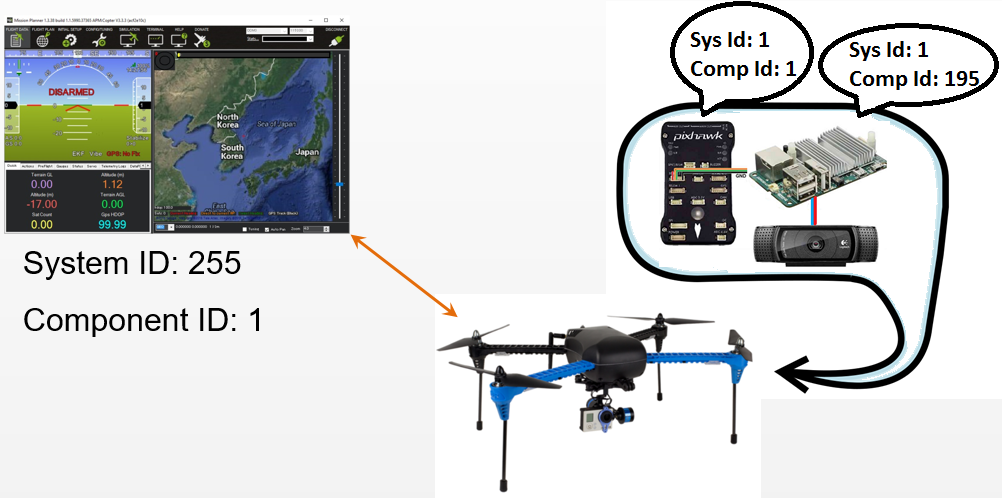
As described on the MAVLink Basics page a MAVLink network is made up of systems (vehicles, GCS, antenna trackers, etc) which are themselves made up of components (flight controller, camera system, etc).
Each message contains a System ID and Component ID field to specify where the message came from. In addition some messages (including SET_POSITION_TARGET_GLOBAL_INT) include target_system and target_component fields to allow specifying which system/component should execute the command.
A value of 0 for the target_system or target_component is
considered a broadcast ID, and will be sent to all systems in the
network/components on the target system.
The routing on ArduPilot systems works in the following way:
All received MAVLink messages are checked by the MAVLink_routing class.
The class extracts the source system id (aka sysid) and component id (aka compid) and builds up a routing array which maps the channel (i.e. USB port, Telem1, Telem2) to the <sysid,compid> pair.
The class also extracts the target system id (
target_system) and component id (target_component) and if these don’t match the vehicle’s <sysid,compid> the messages are forwarded to the appropriate channel using the array above.Messages that don’t have a target <sysid,compid> are processed by the vehicle and then forwarded to each known system/component.
Detailed theory of MAVLink routing¶
This information below is reproduced from the routing code in-source comments (/libraries/GCS_MAVLink/MAVLink_routing.cpp)
When a flight controller receives a message it should process it locally if any of these conditions hold:
It has no
target_systemfieldIt has a
target_systemof zeroIt has the flight controllers target system and has no
target_componentfieldIt has the flight controllers target system and has the flight controllers
target_componentIt has the flight controllers target system and the flight controller has not seen any messages on any of its links from a system that has the messages
target_system/target_componentcombination
When a flight controller receives a message it should forward it onto another different link if any of these conditions hold for that link:
It has no
target_systemfieldIt has a
target_systemof zeroIt does not have the flight controllers
target_systemand the flight controller has seen a message from the messagestarget_systemon the linkIt has the flight controllers
target_systemand has atarget_componentfield and the flight controllers has seen a message from thetarget_system/target_componentcombination on the link
Note
This proposal assumes that ground stations will not send command
packets to a non-broadcast destination (sysid/compid combination) until
they have received at least one package from that destination over the
link. This is essential to prevent a flight controller from acting on a
message that is not meant for it. For example, a PARAM_SET cannot be
sent to a specific <sysid/compid> combination until the GCS has seen a
packet from that <sysid/compid> combination on the link.
The GCS must also reset what<sysid/compid> combinations it has seen on a link when it sees a SYSTEM_TIME message with a decrease in time_boot_ms from a particular <sysid/compid>. That is essential to detect a reset of the flight controller, which implies a reset of its routing table.