Plane Navigation and Altitude Control Overview¶
Navigation¶
In auto-navigating modes like AUTO and CRUISE, or when responding to MAVLink navigation commands, ArduPlane usually uses two WAYPOINT locations (see location object) and flies a wind compensated path between them:
next_WP: the destinationprev_WP: the beginning point
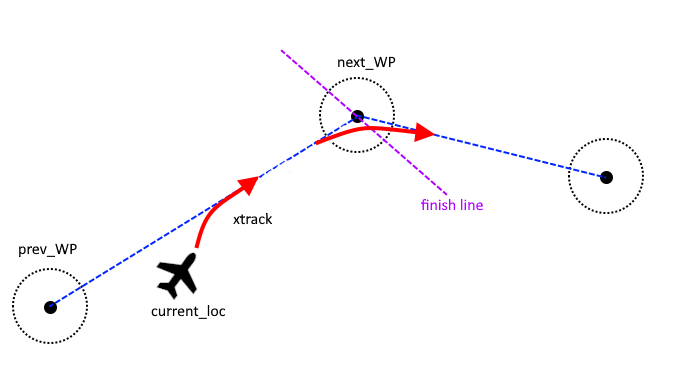
The code usually uses do_xxx to setup these waypoints (see commands logic module). Sometimes, rather than having an existing starting point to use as prev_WP, code can use the set_``next_WP`` method using auto_state.next_WP_crosstrack variable value to set the prev_WP to either the current waypoint destination (next_WP), or current location. Usually, you want to have the crosstrack false for the first waypoint so you proceed directly from your current position, instead of tracking to the line from a previously set destination. When entering a new mode, the prev_WP is always set to the current location, and crosstracking is initially disabled to assure navigation directly to whatever the new next_WP is set by the mode.
Auto-navigating modes call their navigation method, usually involving a verify_xxx command, to determine if the destination has been reached and setup the next destination, if needed. Determining course correction and navigation roll angles is done by the L1 Controller .
AP_Common:Location.h has many useful methods for manipulation locations.
Altitude Control¶
Altitude control is managed by TECS (Total Energy Control System) for Speed and Height Tuning Guide using demanded altitude from the mode, in altitude controlled mode. Modes use the update_target_altitude to calculate demanded altitude for TECS which will calculate the altitude profile between waypoints(setup_glide_slope or maintain current altitude. Altitude target can be changed by MAVLink command (DO_CHANGE_ALT) or by stick control using update_fbwb_speed_height method.
Note
if you are actually moving away from the next waypoint, as usually the case if RTL climbing before turning toward home option is set, the prev_WP will have to be continuously reset to present position and the glide slope re-setup in order to continue to climb.