Auto Mode¶
In Auto mode the vehicle will follow a pre-programmed mission stored in the autopilot which is made up of navigation commands (i.e. waypoints) and “do” commands (i.e. commands that do not affect the location of the vehicle including triggering a camera shutter).
This mode requires the vehicle have GPS and/or visual odometry or wheel encoders.
Creating a Mission¶
Most ground stations are capable of creating and uploading missions. Mission Planner allows this using the Flight Planner screen:
connect your autopilot to your PC using a USB cable or telemetry
open the Mission Planner on your PC and press the Connect button
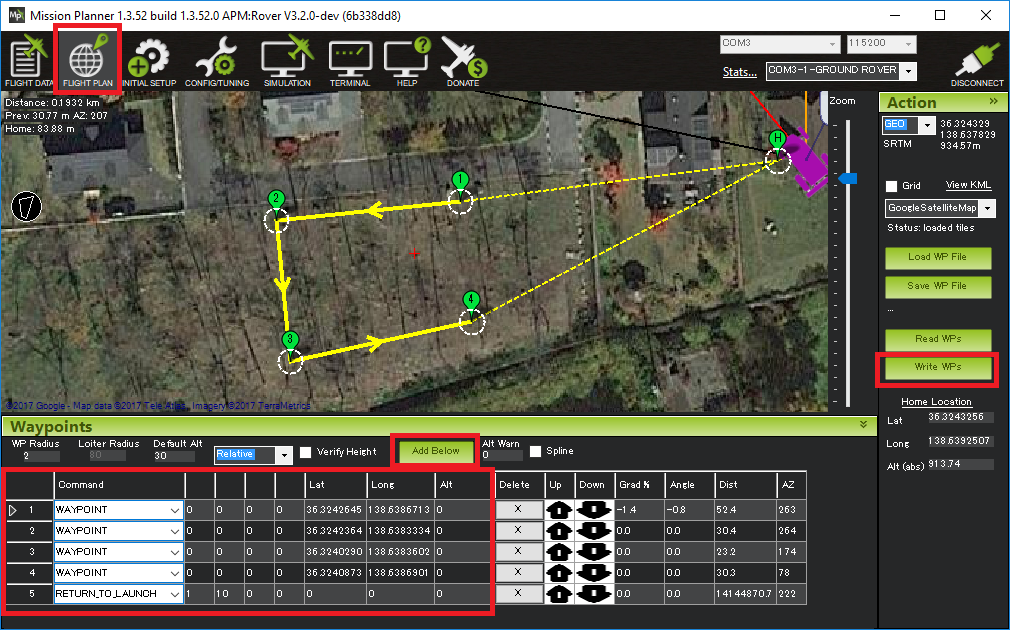
go to the Flight Planer screen and click on the map in a few places to add waypoints
in the command list section, click once on the last waypoint command in the list and press the “Add Below” button, a new command WAYPOINT command should appear at the bottom of the list
click on the word WAYPOINT and change the command to “RETURN_TO_LAUNCH”
upload the mission to the autopilot using the “Write WPs” button.
Starting the Mission¶
The following instructions should be followed to start the mission:
setup the transmitter mode switch so that Auto can be selected
take the vehicle outside, power it on and wait for a good position estimate (LED will turn green)
change the mode to AUTO and the vehicle should begin executing the commands one after another
if telemetry is connected you should see the vehicle travelling around the course
if you notice any odd behaviour, use the transmitter’s mode switch at any time to change back to MANUAL or HOLD
if all goes well the vehicle will travel the course and then return to the point where it was armed (assuming the final command was Return-To-Launch)
Starting the Mission with a Kick¶
The mission normally starts the moment the vehicle is switched into Auto mode but alternatively it can be configured to wait for an push by setting the AUTO_KICKSTART parameter to an acceleration in m/s/s. A value of 2 m/s/s will normally work.
Speed Nudging¶
While the vehicle is executing a mission, the user can increase the vehicle’s speed by raising the transmitter’s throttle stick to between 75% and 100%. At 75% the vehicle will remain at it’s configured speed (i.e. WP_SPEED), this linearly increases to the vehicle’s maximum speed as the pilot’s throttle stick reaches 100%.
Mission End¶
If a mission ends on a waypoint, then it will switch to a mode determined by the MIS_DONE_BEHAVE parameter. It can be changed from this mode either by the RC mode switch changing, or via ground control station.
Resuming or Restarting a Mission¶
If a mission is interrupted (for example if the user switches the vehicle out of Auto mode before it has completed the mission) the last command executed is stored and when the vehicle is next returned to Auto mode it will resume the mission from this command. Note: disarming the vehicle or rebooting the autopilot will reset the mission back to the first command.
If you would prefer the mission was always restarted from the beginning, set the MIS_RESTART parameter to “1”.
Setting the active command¶
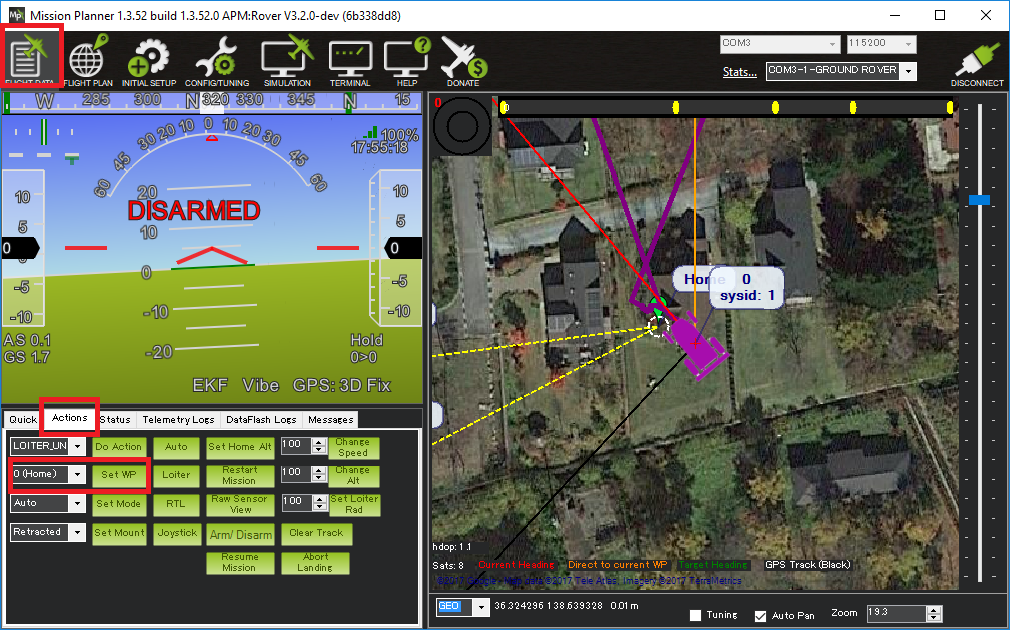
While the vehicle is executing a mission in Auto, the active command can be changed from the ground station. If using Mission Planner this is done from the Flight Data >> Actions tab’s “Set WP” button.
Tuning¶
Details on how to tune the controllers for good waypoint control can be found on the Tuning Navigation page.