Failsafes¶
Rover supports three failsafe mechanisms as described below.
Radio Failsafe (aka Throttle Failsafe)¶
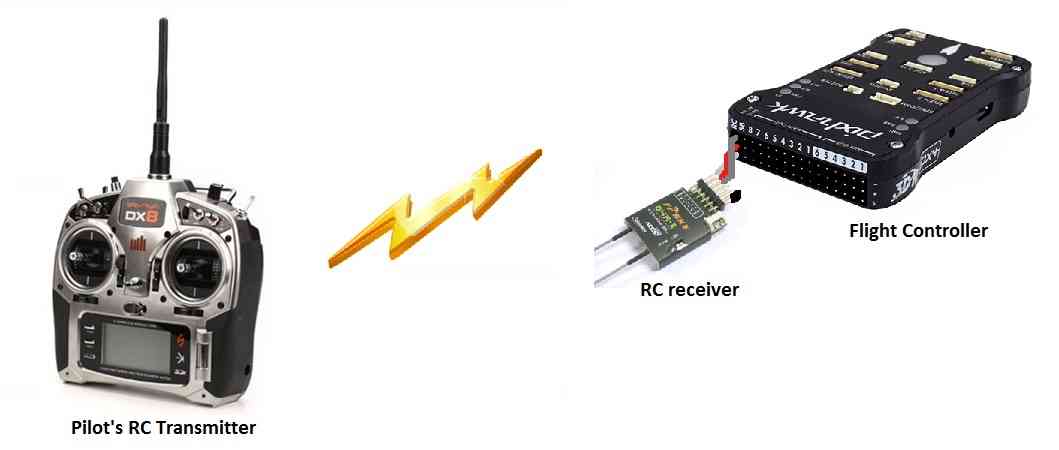
This failsafe is triggered if the connection between the user’s transmitter and the receiver on the vehicle is lost for at least FS_TIMEOUT seconds (default = 1 sec).
the loss of transmitter/receiver connection is detected by:
no signals being sent from the receiver to the autopilot board OR
the throttle channel (normally input channel 3) value falling below the FS_THR_VALUE parameter value OR
RC_OVERRIDES are lost if using a GCS only is being used,
if FS_ACTION is “1”, the vehicle will RTL to home, if “2” the vehicle will Hold, if “3” or “4” the vehicle will attempt to use SmartRTL but if this mode cannot be engaged the vehicle will RTL or Hold respectively. If “5”, it will Disarm. “6” will switch to Loiter mode if possible, else to Hold mode. switch
once the transmitter/receiver connection is restored, the user must use the transmitter’s mode switch to re-take control of the vehicle in Manual (or any other mode)
Battery Failsafe¶
Note
This failsafe requires the vehicle have a working Power Module.
Note
ArduPilot supports up to 10 batteries/power monitors. All the discussion below applies to those optional batteries also. Each can trigger a failsafe and each can have different actions and setup values. In addition, a group of batteries can be treated as a single unit, see BATTx_MONITOR = 10.
When the failsafe will trigger¶
If enabled and set-up correctly the battery failsafe will trigger if the main battery’s
voltage drops below the voltage held in the BATT_LOW_VOLT parameter (or FS_BATT_VOLTAGE in older versions) for more than 10 seconds. If set to zero (the default value) the voltage based trigger will be disabled.
remaining capacity falls below the BATT_LOW_MAH parameter (or FS_BATT_MAH in older versions) 20% of the battery’s full capacity is a good choice (i.e. “1000” for a 5000mAh battery). If set to zero (the default) the capacity based trigger will be disabled (i.e. only voltage will be used)
What will happen¶
When the failsafe is triggered:
Buzzer will play a loud low-battery alarm
LEDs will flash yellow
A warning message will be displayed on the ground station’s HUD (if telemetry is connected)
BATT_FS_LOW_ACT configures the failsafe action to take. “0” to take no action (default), “1” to change into RTL, “2” to change to Hold, if “3” or “4” the vehicle will attempt to use SmartRTL but if this mode cannot be engaged the vehicle will RTL or Hold respectively. “5” will disarm the vehicle. “6” will switch to Loiter mode if possible, else to Hold mode.
Two-Stage Battery Failsafe¶
Rover also includes a two-layer battery failsafe. This allows setting up a follow-up action if the battery voltage or remaining capacity falls below an even lower threshold.
BATT_CRT_VOLT - holds the secondary (lower) voltage threshold. Set to zero to disable. Default is zero.
BATT_CRT_MAH - holds the secondary (lower) capacity threshold. Set to zero to disable. Default is zero.
BATT_FS_CRT_ACT - holds the secondary action to take. It has the same options and default as BATT_FS_LOW_ACT.
Advanced Battery Failsafe Settings¶
BATT_FS_VOLTSRC allows configuring whether the raw battery voltage or a sag corrected voltage is used
BATT_LOW_TIMER can configure how long the voltage must be below the threshold for the failsafe to trigger (10 sec default)
BATTx_parameters can be setup to trigger the failsafe on other batteries
GCS Failsafe (aka Telemetry Failsafe)¶
The Ground Station Control (GCS) failsafe controls how Rover will behave if contact with the GCS is lost. The GCS failsafe monitors the time since the last MAVLink heartbeat from the GCS. If no heartbeat is received FS_GCS_TIMEOUT seconds (Default is 5 seconds), the GCS failsafe event will trigger based on your parameter settings. Note that if no GCS is ever connected, the GCS failsafe will remain inactive regardless of parameter settings.
Enabling the failsafe in all versions¶
In parameters list, set the FS_GCS_ENABLE parameter to:
Disabled (Value 0) will disable the GCS failsafe entirely.
Enabled (Value 1) will execute the FS_ACTION when Failsafe trigger.
Enabled Continue with Mission in Auto Mode (Value 2) will ignore the failsafe in an Auto Mode mission.
The action done on GCS Failsafe is controlled by the FS_ACTION parameter:
Nothing (Value O) will do nothing.
RTL (Value 1) will active RTL to go home.
Hold (Value 2) will active Hold Mode and stay in place.
SmartRTL or RTL (Value 3) will active SmartRTL mode to go back home or RTL if SmartRTL doesn’t work.
SmartRTL or Hold (Value 4) will active SmartRTL mode to go back home or Hold mode if Smart RTL doesn’t work.
You must use the transmitter’s mode switch to re-take control of the vehicle in Manual (or any other mode), or change modes with the GCS itself, if communication is re-established.
Crash Check¶
If enabled by setting the FS_CRASH_CHECK parameter to “1” (for Hold) or “2” (for Hold and Disarm) this failsafe will switch the vehicle to Hold and then (optionally) disarm the vehicle if all the following are true for at least CRASH_TIMEOUT seconds:
velocity falls below CRASH_VEL_MIN
the vehicle is turning at less than CRASH_TRAT_MIN
demanded throttle to the motors (from the pilot or autopilot) is at least CRASH_THR_MIN
In addition, the CRASH_ANGLE parameter immediately enables the same actions above if the vehicle’s roll or pitch angle exceeds that value. “0” disables this check.
A Lua script applet is available to extend crash check actions.
Hold Mode Failsafes¶
The FS_OPTIONS bitmask parameter determines if failsafes will be recognized while in HOLD Mode. If bit 0 is set, then failsafes will be recognized and acted upon. If not, failsafes will be ignored in HOLD mode (default).
Hardware Watchdog¶
See Independent Watchdog and Crash Dump for details.