Return to Launch¶
Returning to Launch (either HOME or a Rally point) can be executed by either switching to RTL mode or QRTL mode. In each case a key concept is the return point. This is defined as the closest rally point, or if a rally point is not defined, then the HOME location. See the Rally Points page for more information on rally points.
RTL mode has four different options for its behavior but basically uses fixed wing flight for at least the majority of the return. Behavior also depends on how close to the return point the vehicle is when entered and from what mode, fixed wing or VTOL/QAssist. RTL mode behavior is determined by the Q_RTL_MODE parameter and explained in the sections below.
QRTL mode, by default, will return either in fixed wing mode and land in VTOL mode the same way as the RTL mode selected by Q_RTL_MODE = 3, or by using Q_OPTIONS bit (16), as a pure VTOL return and land.
Note
RC failsafe when in a VTOL mode will only result in either a switch to QLAND, RTL, or QRTL, depending on the Q_OPTIONS bit 5 (QRTL) and bit 20 (RTL) settings (bit 20 overrides bit 5), independent of what the FS_SHORT_ACTN or FS_LONG_ACTN setting is.
RTL Modes¶
Fixed Wing RTL¶
Q_RTL_MODE = 0¶
RETURN FIXED WING AND LOITER
The default behaviour (Q_RTL_MODE = 0)of the RTL mode is the same as for fixed wing. It will fly to the nearest rally point (or HOME if no rally point is defined) and circle as a fixed wing aircraft about that point. The VTOL motors will not be used unless the aircraft drops below the airspeed defined in Q_ASSIST_SPEED. The altitude the aircraft will circle at will be the altitude in the rally point, or the RTL_ALTITUDE altitude if a rally point is not being used.
If in a VTOL mode when RTL is selected (either by a failsafe action or the pilot), the Quadplane will immediately transition to fixed wing and fly back as if in normal fixed wing RTL mode.
Hybrid RTL¶
The another options for RTL in a QuadPlane are to fly as a fixed wing aircraft until it is close to the return point at which time it switches to VTOL QRTL mode and land vertically at the return point. To enable this type of hybrid RTL behavior you need to set the Q_RTL_MODE parameter to 1, 2, or 3.
Note
for the code to judge when to start the transition to VTOL in order to arrive at the point it should be totally VTOL, the Q_TRANS_DECEL parameter is used to calculate the when to start the transition. If the vehicle is overshooting, this value can be lowered, and vice-versa.
Q_RTL_MODE = 1¶
RETURN FIXED WING, SWITCH TO QRTL, and LAND
If in fixed wing mode when RTL is entered, the initial altitude that will be aimed for in the fixed wing portion of the hybrid RTL is the same as for a fixed wing RTL. You should set your rally point altitude and RTL_ALTITUDE parameters appropriately to ensure that the aircraft travels at a safe altitude.
The distance from the return point at which the aircraft switches from fixed wing to VTOL flight is set using the RTL_RADIUS parameter, or if that is not set then the WP_LOITER_RAD parameter is used. The aircraft will then slow down as it approaches the return point, aiming for an altitude set by Q_RTL_ALT.
Once the return point is reached the aircraft begins to descend and land.
If in a VTOL mode when RTL is selected (either by a failsafe action or the pilot), the Quadplane will immediately transition to fixed wing and fly back as if it had been entered while in a fixed wing mode.
Q_RTL_MODE = 2¶
RETURN FIXED WING, LOITER TO ALT, SWITCH TO QRTL, LAND
Setting Q_RTL_MODE to 2 results in behavior similar to above, but with the vehicle returning like normal fixed wing RTL until it reaches Q_FW_LND_APR_RAD, then loitering in fixed wing mode down to Q_RTL_ALT altitude, and then exiting facing the wind and executing a QRTL to the home position. Be sure the loiter portion is set up to clear any obstacles.
If RTL is triggered within the larger of RTL_RADIUS and WP_LOITER_RAD, and below Q_RTL_ALT, in a VTOL mode or assisted fixed wing flight, the vehicle will proceed immediately toward Q_RTL_ALT and the landing position and then land (ie QRTL mode).
If in a VTOL mode or assisted fixed wing flight when RTL is selected (either by a failsafe action or the pilot) beyond those radii, the Quadplane will immediately transition to fixed wing and fly back as if it had been entered while in a fixed wing mode.
Q_RTL_MODE = 3¶
RETURN FIXED WING,APPROACH TO VTOL TRANSITION POINT, AIRBRAKE, SWITCH TO QRTL, LAND
Setting Q_RTL_MODE to 3 results in behavior similar to a normal QRTL. The vehicle will enter an “APPROACH” phase, and will return at RTL_ALTITUDE and at a calculated distance, start a descent towards Q_RTL_ALT. As it approaches the landing position, ArduPilot starts an “airbraking” phase in non-tailistters to slow the vehicle and once slowed enters full VTOL mode and proceeds to execute a VTOL landing. This behavior is also used by default for the QRTL mode unless Q_OPTIONS bit 16 is set to prevent the Hybrid operation above.
In effect, this enables the QRTL mode for any RTL actuation: failsafe actions, mode change to QRTL, or completion of a mission (unless the last mission item prevents RTL).
Note
This mode is also used by default in all mission VTOL_LANDINGs unless the Q_OPTIONS bit 16 is set to disable it.
This fixed wing “approach” allows VTOL landings to be used without needing to setting up approach waypoints to reduce altitude and get close enough to proceed in VTOL mode toward the landing point. If disabled by bit 16, the vehicle will instantly transition to VTOL mode upon that mission items execution, or upon mode changes to QRTL, and navigate to its landing point in VTOL before doing a QLAND. This means that you should be very close to the landing site if the FW approach mode is disabled in a mission since it will proceed in VTOL flight to the land point.
The image below details the phases of the approach and landing with the default setting of bit 16 (ie, not enabled):
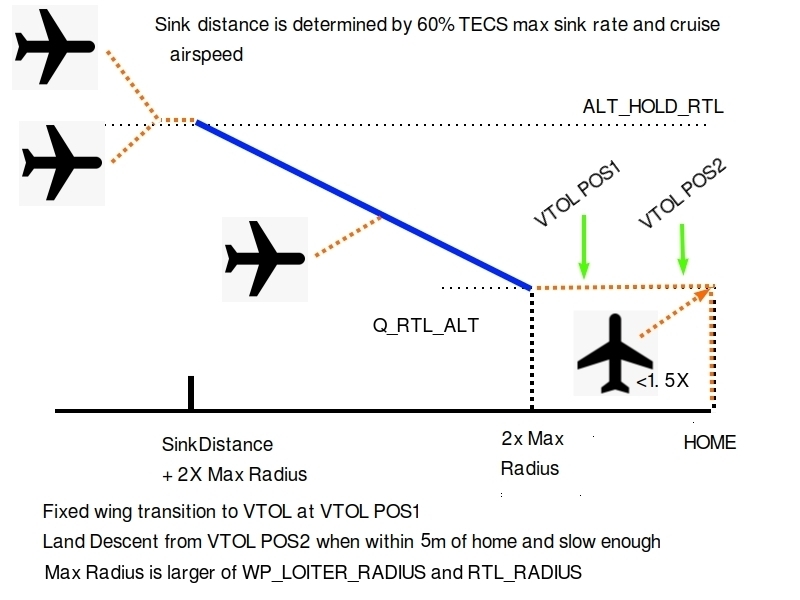
The phases of the approach are:
in a fixed wing mode when further than 2 times the greater of either RTL_RADIUS or WP_LOITER_RADS (MAXRAD) plus a calculated distance needed to descend from RTL_ALTITUDE to Q_RTL_ALT, the plane will attempt to climb or descend to RTL_ALTITUDE. If within that range, it will attempt to climb/descend to a linear descent slope, meet it, and continue to descend, as shown above.
if started further than 2X “MAXRAD” but closer than above, at 2x MAXRAD it will continue in fixed wing mode at Q_RTL_ALT.
when it reaches a point that is within the VTOL stopping distance of the landing point (calculated using the VTOL deceleration parameter Q_TRANS_DECEL which gives the deceleration that will occur as the vehicle transitions to VTOL and the vehicle’s current speed), it will transition to VTOL mode and send a message that it is in “VTOL Position1” and continue moving to the land point. If the vehicle is NOT a tailsitter, an “AIRBRAKING” phase may occur before the VTOL transition, spinning up the VTOL motors to create additional braking.
Note
if the vehicle is overshooting “VTOL Position1”, try decreasing Q_TRANS_DECEL in steps. However, this increases the point before “VTOL Position1” that the vehicle will transition to VTOL.
once the QuadPlane is within 5m of the land point and moving less than 2 m/s, it will send a GCS message declaring that it is in “VTOL Position 2”, and final position itself over the land point and begin its landing descent, which will also be indicated by GCS messages
if the approach is entered less than 1.5X MAXRAD, it will immediately move to “VTOL Position 1” state, whether entered from fixed wing or VTOL modes, and move toward the landing site attempting to obtain Q_RTL_ALT as it does so.
if in VTOL mode at greater than 1.5X MAXRAD, the vehicle will climb to Q_RTL_ALT, if below, then transition to fixed wing and start a normal fixed wing RTL, and attempt to navigate to home, executing the approach. The climb and turn toward the landing point will occur at even low altitudes as determined by Q_RTL_ALT, so the FLIGHT_OPTIONS bit 4 for “Climb before turn in RTL” and/or Q_OPTIONS bit 0 for “Level Transitions” might be worth considering for the fixed wing initial phases.
Note
In cases where it is feared that using the approach feature may result in it being initiated too close to HOME due to the 1.5X MAXRAD distance being too close in VTOL modes, instead of using Q_OPTIONS bit 16 to disable the feature entirely, the Q_APPROACH_DIST to increase the distance from HOME that the vehicle needs to be to transition to fixed wing and execute an approach,
QRTL Mode¶
By default, switching to QRTL mode will act exactly as Q_RTL_MODE = 3, above. However, if you prefer to do return to launch as a pure VTOL aircraft (like a multirotor would do) then you can use the QRTL flight mode, but with Q_OPTIONS bit 16 set in order to disable QRTL’s default behavior (which is like the hybrid RTL described above with Q_RTL_MODE = 3). The vehicle will transition to VTOL flight, if not already in VTOL, and then fly at the Q_WP_SPD speed towards the return point, at an altitude of Q_RTL_ALT.
Once the return point is reached the aircraft will start a vertical descent towards the ground for landing. The initial descent rate is set by Q_WP_SPD_DN. Once the aircraft reaches an altitude of Q_LAND_FINAL_ALT the descent rate will change to Q_LAND_FINAL_SPD for the final landing phase.
In the final landing phase the aircraft will detect landing by looking for when the VTOL motor throttle drops below a minimum threshold for 5 seconds. When that happens the aircraft will disarm and the VTOL motors will stop.