Motor Thrust Scaling¶
QuadPlane includes motor thrust scaling which compensates for the non-linear thrust output of most ESCs and motors used in VTOL.
Tip
The default curve should work for nearly all ESC/motor combinations. Normally the parameters should not be adjusted unless the vehicle’s actual thrust curve has been measured.
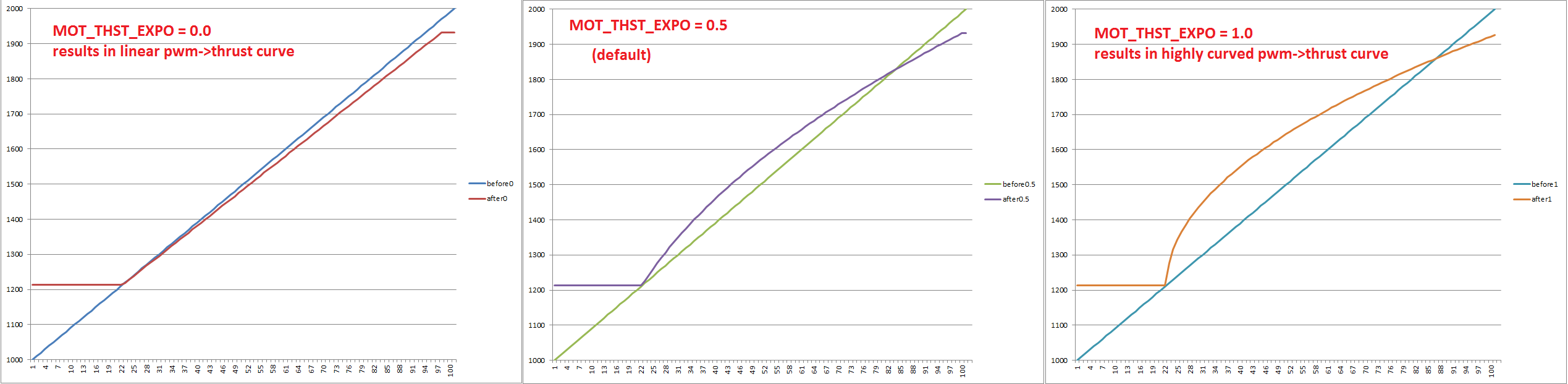
Thrust Curves¶
The curve is controlled by two parameters:
Q_M_THST_EXPO controls the shape of the thrust curve with “0” meaning a completely linear curve and “1.0” being very curved (see pictures below). The default is “0.65” (the image below incorrectly states the default is 0.5).
Q_M_SPIN_MAX controls the point at which the thrust flattens out near its maximum. This is set at 0.95 as default, which means 95% of full throttle.
Thrust Stands¶
The thrust stands listed below can be used to measure the PWM signal vs thrust output for a vehicle’s specific motor, esc and battery
Parameter Calculation¶
A copy of this spreadsheet can be used to calculate the appropriate values from the thrust stand data above.