QLOITER Mode¶
QLOITER Mode automatically attempts to maintain the current location, heading and altitude. The pilot may fly the QuadPlane in QLOITER mode as if it were in a more manual flight mode but when the sticks are released, the vehicle will slow to a stop and hold position.
A good GPS lock, low magnetic interference on the compass and low vibrations are all important in achieving good QLOITER performance.
Controls¶
The pilot can control the QuadPlane’s position with the control sticks.
Horizontal location can be adjusted with the Roll and Pitch control sticks with the default maximum horizontal speed being 5m/s (see Tuning section below on how to adjust this). When the pilot releases the sticks the QuadPlane will slow to a stop.
Altitude can be controlled with the Throttle control stick just as in QHOVER mode.
The heading can be set with the Yaw control stick
The vehicle can be armed in QLOITER mode in the same manner as any other mode, but only once the GPS has 3D lock, and the HDOP has dropped below 2.0, just as with any other mode, unless the default arming checks have been modified to avoid checking GPS (not recommended!). More details on LED patterns here.
Tuning¶
QLOITER mode incorporates the altitude controller from QHOVER mode. Details for tuning are in QHOVER mode description.
Q_LOIT_SPEED_MS: max horizontal speed in m/s.
Q_LOIT_ACC_MAX_M: max acceleration in m/s/s. Higher values cause the QuadPlane to accelerate and stop more quickly
Q_LOIT_ANG_MAX: max lean angle in centi-degrees (i.e. 3000 = 30deg). By default this value is zero which causes the ATC_ANGLE_MAX parameter’s value to be used
Q_LOIT_BRK_ACC_M: max acceleration in m/s/s while braking (i.e. pilot has moved sticks to center). Higher values will stop the vehicle more quickly
Q_LOIT_BRK_DELAY: the delay in seconds before braking starts once the pilot has centered the sticks
Q_LOIT_BRK_JRK_M: max change in acceleration in m/s/s/s while braking. Higher numbers will make the vehicle reach the maximum braking angle more quickly, lower numbers will cause smoother braking
Q_P_NE_POS_P: converts the horizontal position error (i.e difference between the desired position and the actual position) to a desired speed towards the target position. It is generally not required to adjust this
Q_P_NE_VEL_P converts the desired speed towards the target to a desired acceleration. The resulting desired acceleration becomes a lean angle which is then passed to the same angular controller used by QSTABILIZE. It is generally not required to adjust this
Common Problems¶
The vehicle circles (aka “toiletbowls”). This is normally caused by a compass problem the most likely being magnetic interference from the power cables under the autopilot. Other possibilities include bad compass offsets set during the live calibration process or incorrect compass orientation.
The vehicle takes off in the wrong direction as soon as QLOITER is engaged. The cause is the same as #1 except that the compass error is greater than 90deg. Please try the suggestions above to resolve this.
The vehicle is QLOITERing normally and then suddenly takes off in the wrong direction. This is generally caused by a GPS Glitch. There is no 100% reliable protection against these which means the pilot should always be ready to take-over manual control. Beyond that ensuring a good GPS HDOP before take-off is always good and it may help to reduce the
EK2_GLITCH_RADand/orEK3_GLITCH_RADparameters (see GPS glitch wiki page for details) to tighten up on the glitch detection.QuadPlane slowly descends or climbs until the pilot retakes control in stabilize. Normally this is caused by not having the throttle stick in the mid position. This commonly happens when the pilot is switching into an altitude holding mode from a manual flight mode (like QSTABILIZE) on a QuadPlane that does not hover at mid throttle. Usually it is desired to hover in any mode at mid-stick on throttle, so that transitions between modes is easily accomplished without throttle position changes. This can be adjusted using the Q_M_THST_HOVER parameter, or automatically learned in QHOVER or QLOITER modes by enabling Q_M_HOVER_LEARN.
Display HDOP on Mission Planner¶
The HDOP value can be made clearly visible through the mission planner’s Quick screen by double clicking and then selecting “gpshdop” from the large grid of checkboxes.

Verifying QLOITER performance with dataflash logs¶
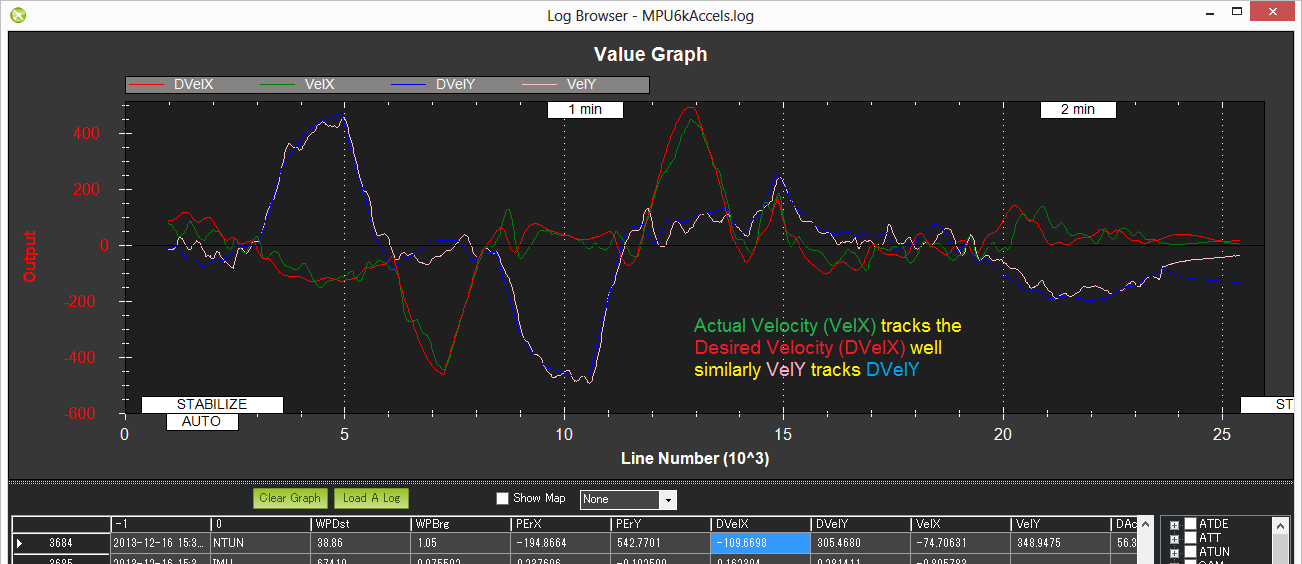
Viewing the QLOITER’s horizontal performance is best done by downloading a dataflash log from your flight, then open it with the mission planner and graph the NTUN message’s DesVelX vs VelX and DesVelY vs VelY. In a good performing QuadPlane the actual velocities will track the desired velocities as shown below. X = latitude (so positive = moving North, negative = South), Y = longitude (positive = East, negative = West).
Checking altitude hold performance is the same as for QHOVER mode.