SIYI A8, ZR10, ZR30, ZT6 and ZT30 Gimbals¶
The SIYI A8, ZR10, ZR30, ZT6 and ZT30 are 3-axis gimbals and camera which can communicate with ArduPilot using a custom serial protocol

Warning
The Siyi A2 is not supported
Where to Buy¶
These gimbals can be purchased directly from SIYI
Connecting to the Autopilot¶
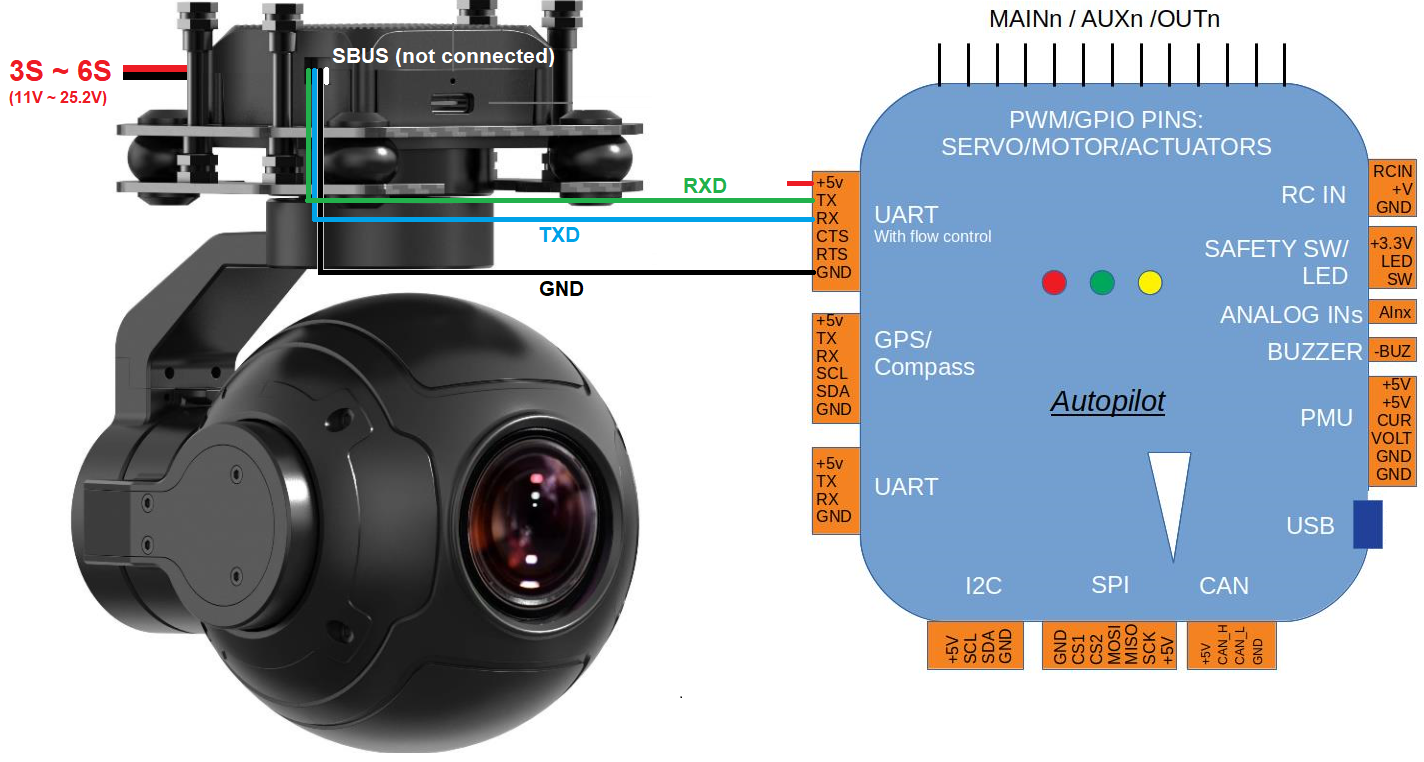
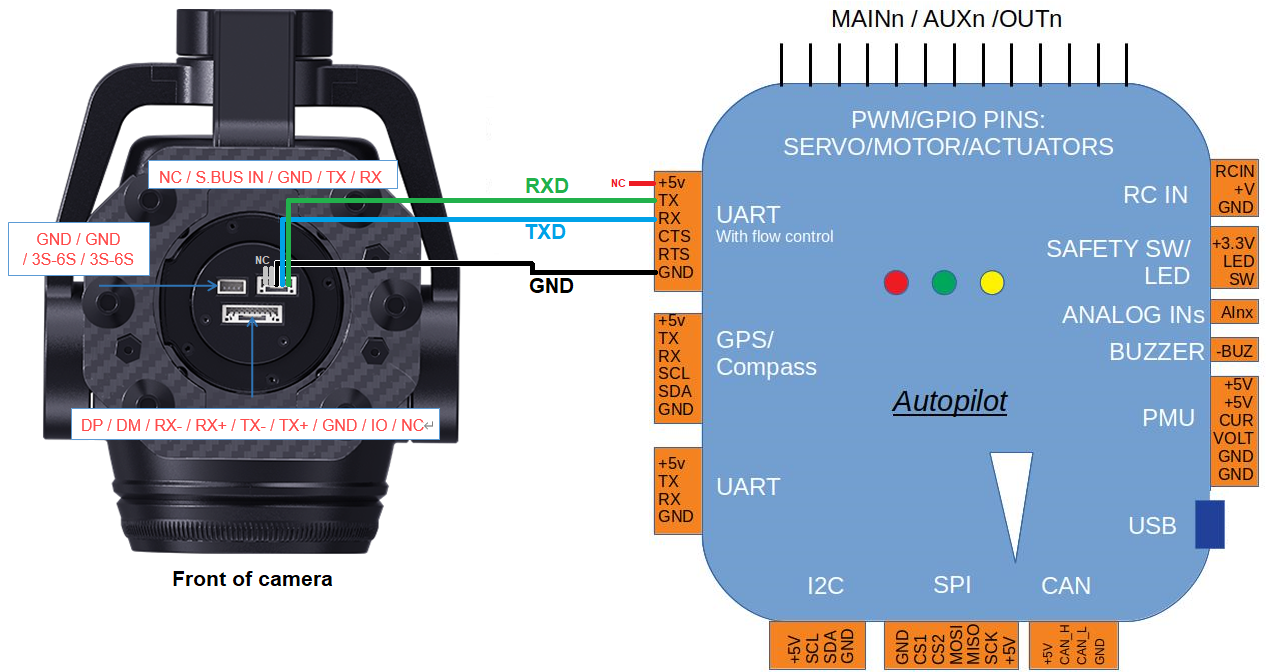
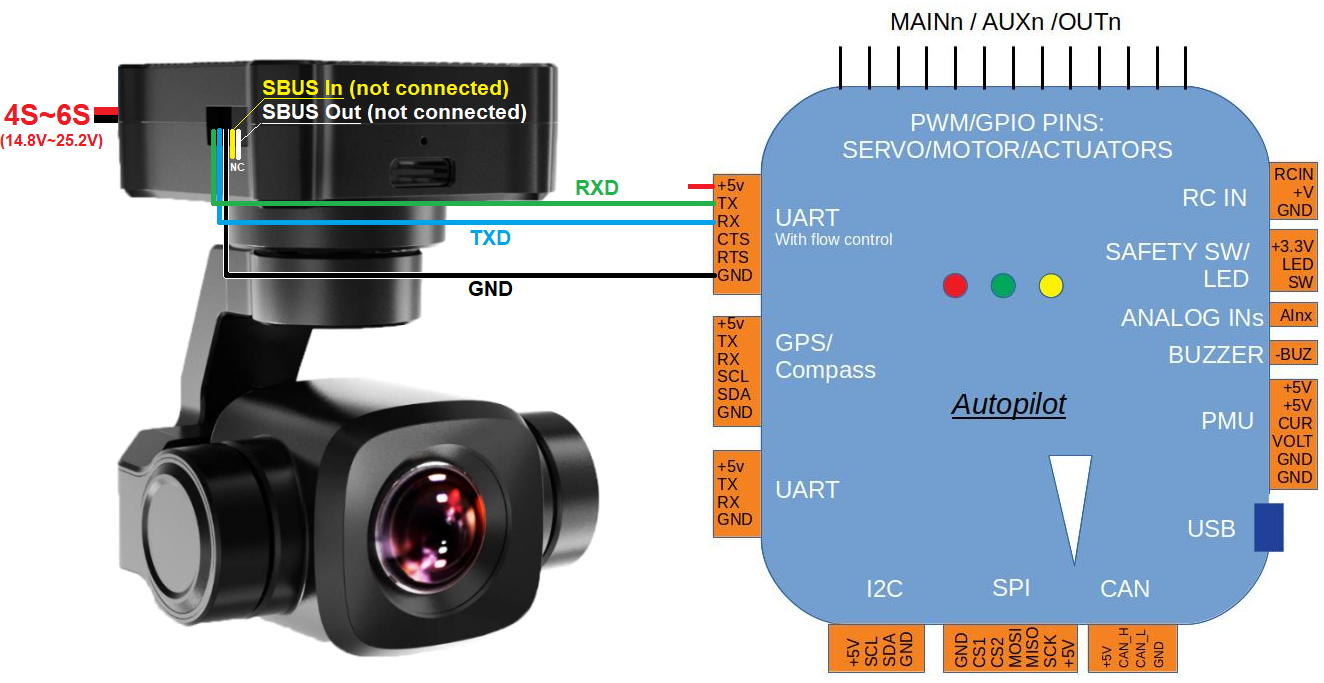
Connect the gimbal’s RX, TX and GND pins to one of the autopilot’s serial ports as shown above.
Connect with a ground station and set the following parameters. The params below assume the autopilot’s telem2 port is used and the Camera1 control instance,
SERIAL2_PROTOCOL to 8 (“SToRM32 Gimbal Serial”)
SERIAL2_BAUD to “115” for 115200 bps
MNT1_TYPE to “8” (“Siyi”) and reboot the autopilot
MNT1_PITCH_MIN to -90
MNT1_PITCH_MAX to 25
MNT1_YAW_MIN to -135
MNT1_YAW_MAX to 135
MNT1_RC_RATE to 90 (deg/s) to control speed of gimbal when using RC targeting
RC6_OPTION = 213 (“Mount Pitch”) to control the gimbal’s pitch angle with RC channel 6
RC7_OPTION = 214 (“Mount Yaw”) to control the gimbal’s yaw angle with RC channel 7
RC8_OPTION = 163 (“Mount Yaw Lock”) to switch between normal yaw operation and locking mount heading with RC channel 8 (in RC Targeting mode only).
Enable camera controls with one of the following parameters:
set CAM1_TYPE to 4 / “Mount (Siyi)” to allow control of the camera
Optionally these auxiliary functions are also available
RC9_OPTION = 9 (“Camera Trigger”) to take a picture
RC9_OPTION = 166 (“Camera Record Video”) to start/stop recording of video
RC9_OPTION = 167 (“Camera Zoom”) to zoom in and out
RC9_OPTION = 168 (“Camera Manual Focus”) to adjust focus in and out
RC9_OPTION = 169 (“Camera Auto Focus”) to trigger auto focus
Warning
A8 does not support zoom at 4K recording resolution
Configuring the Gimbal¶
Download, install and run “SIYI PC Assistant” which can be found on any of the links below
Ensure the gimbal is running a recent firmware. For ZR10 use 0.2.1 or higher. For A8 use 0.1.7 or higher.

Ethernet Connectivity¶
Instead of using a UART serial connection to control the gimbal, an Ethernet virtual serial connection may also be used, as well as transmitting a video stream from the camera.
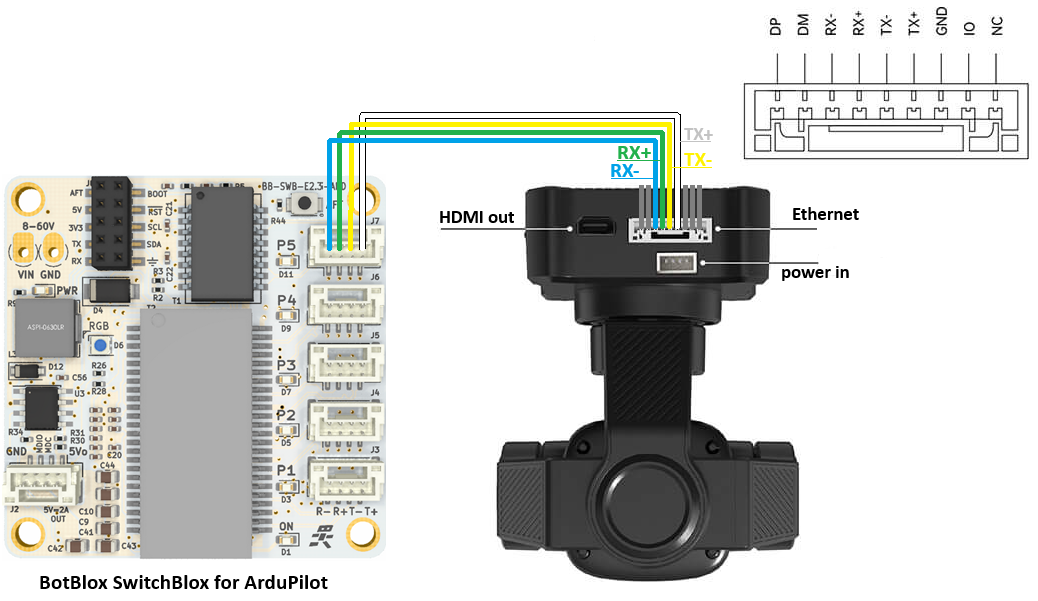
An example of the setup of the gimbal in a networked ArduPilot vehicle system is detailed in Ethernet Connected Vehicle Example but in short, to control the gimbal over Ethernet
Connect the gimbal and autopilot using an ethernet adapter
Ensure the autopilot and gimbal are on the same subnet (e.g the first 3 octets of the IP address match, 4th octet is different)
The gimbal’s IP address can be set using the Siyi Assistant software (see image below)
Set the autopilot’s NET_ENABLE = 1 and reboot to enable networking
Set the autopilot’s IP address using NET_IPADDR0, NET_IPADDR1, NET_IPADDR2, NET_IPADDR3 (e.g. 192.168.144.14)
Create a serial connection over ethernet
Set NET_P1_TYPE = 1 (UDP Client) and reboot the autopilot
Set NET_P1_IP0, NET_P1_IP1, NET_P1_IP2, NET_P1_IP3 to the gimbal’s IP address (e.g. 192.168.144.25)
Set NET_P1_PORT = 37260 (port that Siyi gimbals listens for commands on)
Set NET_P1_PROTOCOL = 8 (Gimbal)
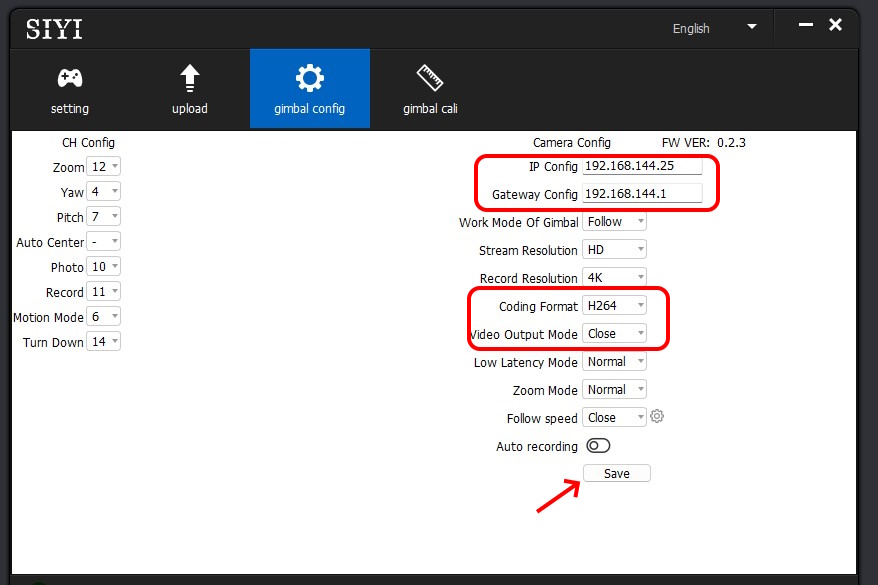
To view the Siyi cammera’s live video over Ethernet use the Siyi Assistant to set the “IP Config”, “Coding Format” and Video Output mode as shown below. Note that the IP’s first three numbers should match the telemetry system being used (e.g. Herelink, Siyi MK32, etc) or PC the camera is connected to. In image below shows the default IP address for Siyi gimbals
The video is available using an RTSP URL which can vary by camera type. Note the URL’s IP address should match the camera’s IP address that was entered into the Siyi Assistant above
A8, ZR10: rtsp://192.168.144.25:8554/main.264
ZT6 (IR): rtsp://192.168.144.25:8554/video1
ZT6 (rgb): rtsp://192.168.144.25:8554/video2
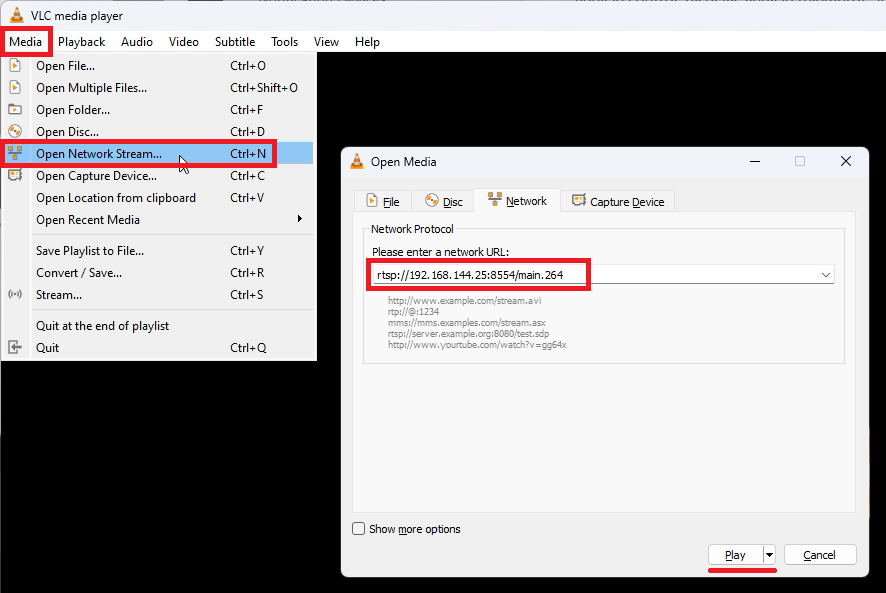
If connected to a PC, VLC can be used to test the feed
Open VLC
Select “Media”, “Open Network Stream” and enter the RTSP URL
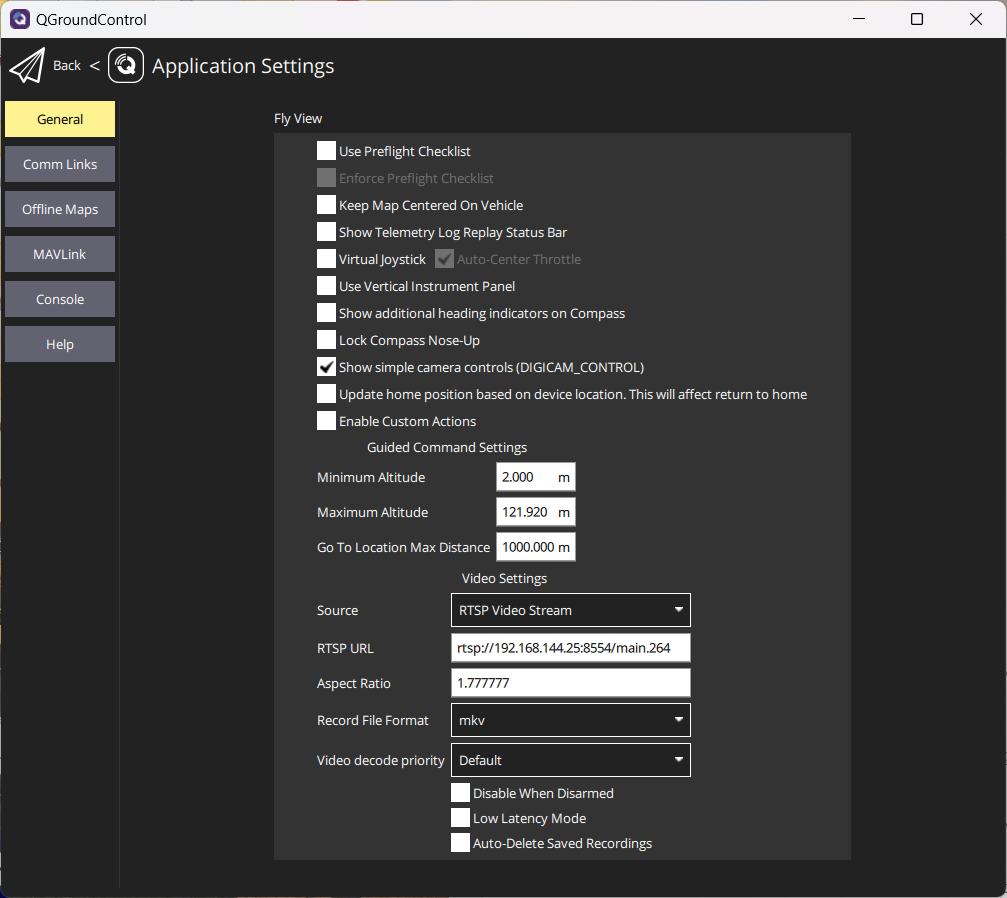
If using QGC, the live video can be configured from the “Application Settings”, “General” screen. Set “Source” to “RTSP Video Stream” and “RTSP URL” to one of the RTSP URLs listed above
If using Mission Planner, the live video can be displayed on the Data screen by following these instructions
Downloading Images and Video¶
Images and videos captured by the camera can be remotely downloaded to a companion computer or PC via Ethernet using this siyi-download.py Python script
Control and Testing¶
See Gimbal / Mount Controls and Camera Controls for details on how to control the camera and gimbal using RC, GCS or Auto mode mission commands