Attollo Engineering Wasp200 Lidar¶
The Wasp200 has a range of up to 200m and an update rate up to 56hz. More specifications can be found here.

Where to Buy¶
The Attollo Engineering online store sells the lidar directly
Connecting to the Autopilot¶
For a serial connection you can use any spare Serial/UART port. The diagram below shows how to connect to SERIAL4.
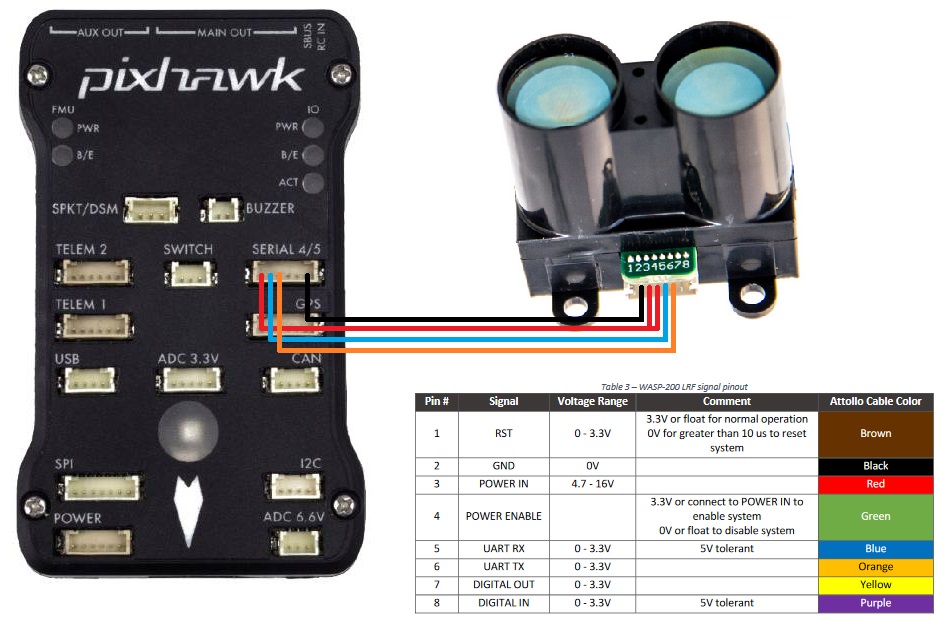
If the SERIAL4 port on a Pixhawk is being used then the following parameters should be set for the first rangefinder:
SERIAL4_PROTOCOL = 9 (Lidar)
RNGFND1_TYPE = 18 (Wasp200)
RNGFND1_MIN = 2
RNGFND1_MAX = 200. This is the distance in meters that the rangefinder can reliably read.
RNGFND1_GNDCLR = 0.1 or more accurately the distance in metres from the range finder to the ground when the vehicle is landed. This value depends on how you have mounted the rangefinder.
If instead the SERIAL 2 port (sometimes labeled Telem2) is used then the serial parameters listed above should instead be:
SERIAL2_PROTOCOL = 9
Advanced parameters¶
The following parameters do not normally need adjustment:
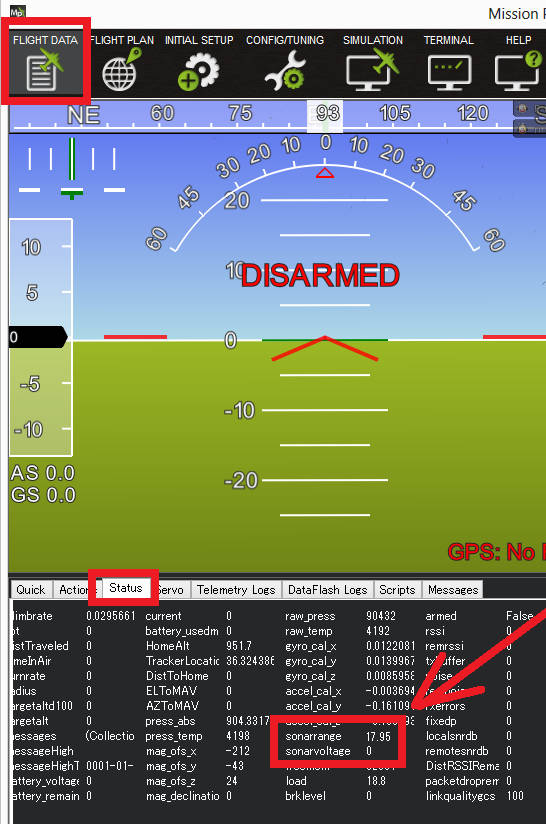
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.