Hex HereFlow Optical Flow Sensor¶
The HereFlow optical flow sensor is a lightweight optical flow sensor including a short range lidar which uses the CAN protocol to communicate with the autopilot. This can be used to improve horizontal position control especially in GPS denied environments.
Warning
The lidar included with the HereFlow is very short range especially outdoors. We strongly recommend using a longer range lidar instead.
Where to Buy¶
The sensor is available from Hex resellers
Connection to Autopilot¶
The flow sensor should be mounted on the underside of the copter with the camera lens pointing downwards. The side of the sensor with the lens should be towards the front of the vehicle.
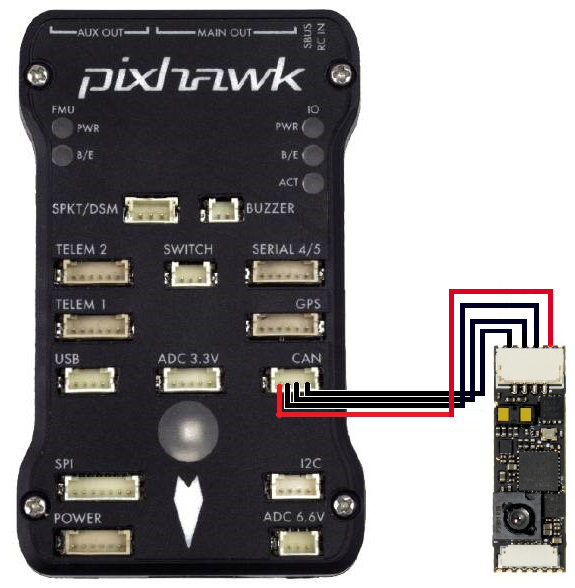
Connect the sensor to the autopilots’ CAN port (if using a Cube note that pre-Apr 2019 boards have CAN1 and CAN2 swapped)
Set FLOW_TYPE = 6 (DroneCAN)
Set CAN_P1_DRIVER = 1 to enable DroneCAN
Set CAN_D1_PROTOCOL = 1 (DroneCAN)
Optionally set BRD_BOOT_DELAY = 3000 (3 seconds) to slow the autopilot’s startup which allows the flow sensor to boot up first and avoid initialisation issues
To use the onboard lidar (not recommended):
Set RNGFND1_TYPE = 24 (DroneCAN)
Set RNGFND1_MAX = 3 to set range finder’s maximum range to 3m
Additional Notes¶
As with the PX4Flow sensor a range finder is required to use the sensor for autonomous modes including Loiter and RTL
FlowHold does not require the use of a rangefinder
Performance can be improved by setting the sensors position parameters. For example if the sensor is mounted 2cm forward and 5cm below the frame’s center of rotation set FLOW_POS_X to 0.02 and FLOW_POS_Z to 0.05.