Vectored Thrust¶
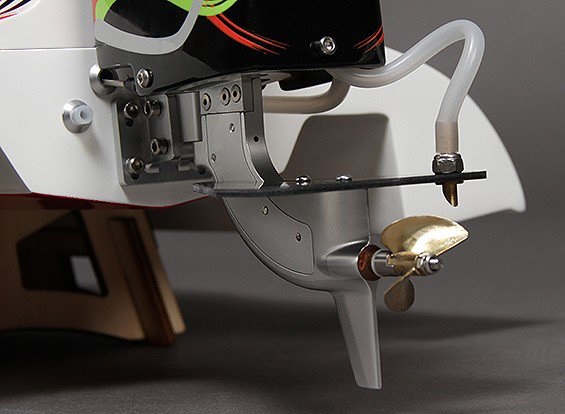
above image is of a Sprint F3 boat from HobbyKing (link)
The “Vectored thrust” feature improves steering control for boats and hovercraft that use a steering servo to aim the motor. This feature should not be used on cars or boats with a rudder that is controlled separately from the motors.
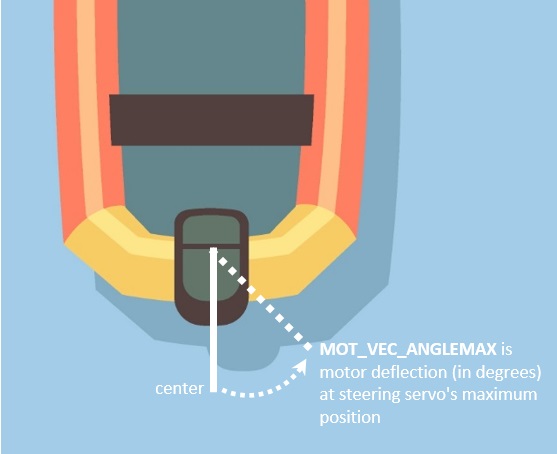
In Rover-4.1.0 (and higher) the feature is enabled by setting MOT_VEC_ANGLEMAX to the angle of deflection of the motor when the steering servo is at its maximum position.
In 4.0 (and earlier) this features was enabled by setting the MOT_VEC_THR_BASE parameter to a value between 10 and 30 (normally 20 works well).
This parameter specifies:
the throttle level above which the steering servo will be scaled towards the center. I.e. if set to 20%, the steering response will be unrestricted between 0% and 20% throttle but above 20% throttle it will be scaled towards the center more and more as throttle increases.
the maximum steering response at full throttle expressed as a percentage. I.e. if set to 20%, at full throttle, full steering input will only result in the steering servo moving 20% of its full range.
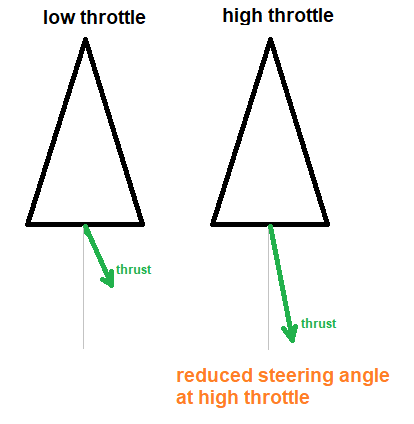
The rough image below shows how the steering servo angle must be reduced as the throttle increases in order to achieve a desired steering response.
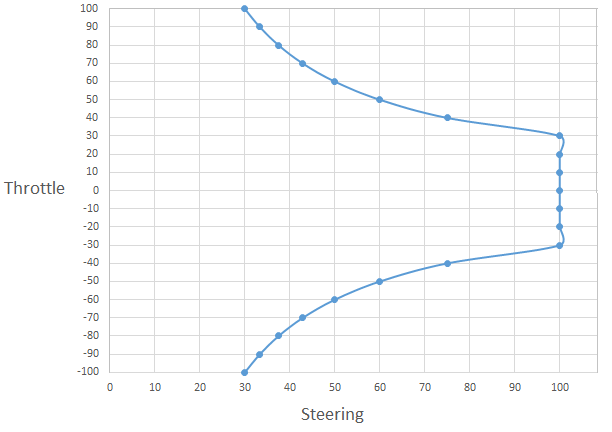
The graph below shows how the steering response is reduced as the throttle is increased when MOT_VEC_THR_BASE = 30.