Calibration: Frame Type (Copters Only)¶
This article explains how to select/calibrate your frame orientation in APM Mission Planner 2 (copter-only). For other calibration tasks, see Autopilot calibration.
1 Prerequisites¶
The vehicle is completely built to flight condition.
Autopilot is connected to APM Planner and connected to Mavlink.
2 Select frame¶
Select Mandatory Hardware, Frame Type and choose the correct diagram to select your vehicle configuration.
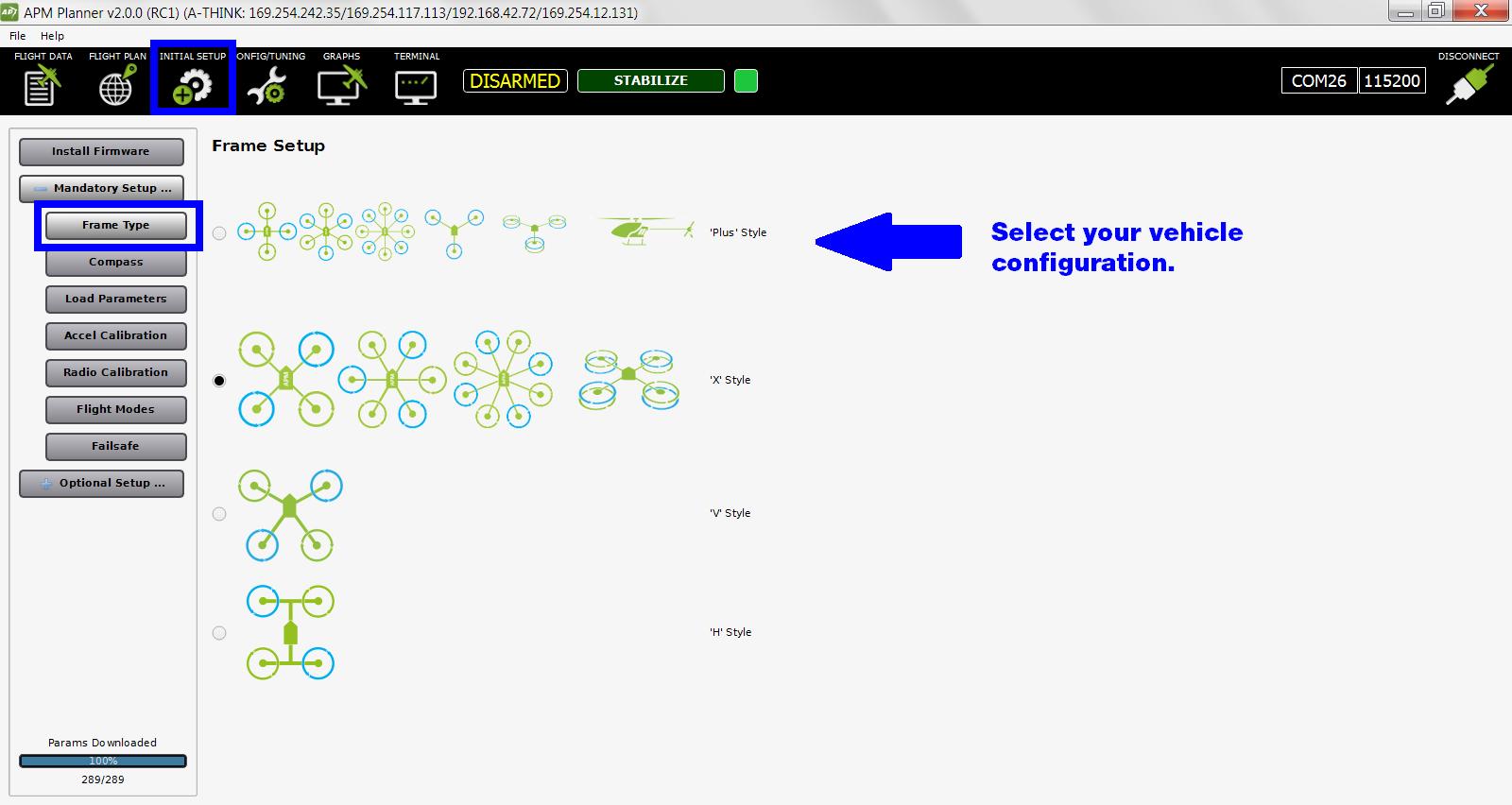
3 X and plus¶
The default configuration is X. If you want one of the arms to serve as the exclusive front-facing direction, select the Plus configuration. For tricopters, traditional helis and Y6s, the frame type is ignored.
4 H frame¶
For an H-Frame quadcopter, use the option to set the frame type to ’3′ in the Advanced Parameter Tab. To apply the H-frame configuration, swap the left rear and right rear props and reverse the motor direction for each of those motors (by swapping any two motor wires). Repeat the same process for the front two motors.
5 V frame¶
Select the V frame for a quadcopter with wide-angled front arms.