Credits and Contributors¶
APM Planner 2.0 is the next generation of ground control station. It is the offspring of Mission Planner and QGround Control, combining the simple user interface of Mission Planner and cross platform capability of QGround Control.
We offer a special thanks to Michael Oborne and his team at Mission Planner and Lorenz Meier and the team at QGround Control.
APM Planner 2.0 is written in Qt, a cross platform development environment that allows it to run on Windows, Mac, and Linux.
APM Planner is currently lead by:
with contributions from:
APM Planner

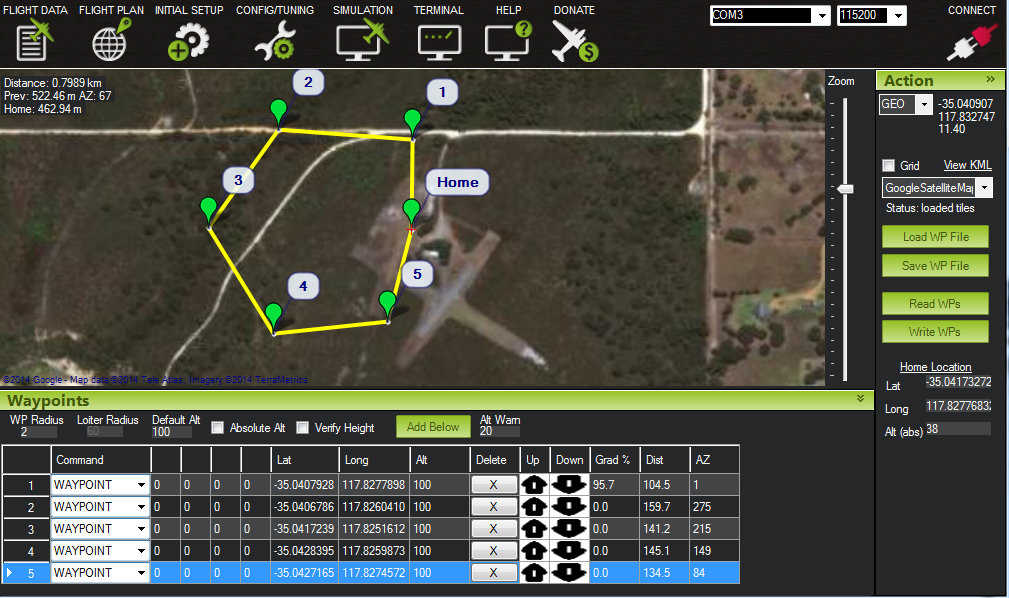
Mission Planner
QGround Control