Holybro Kakute H7 Mini¶
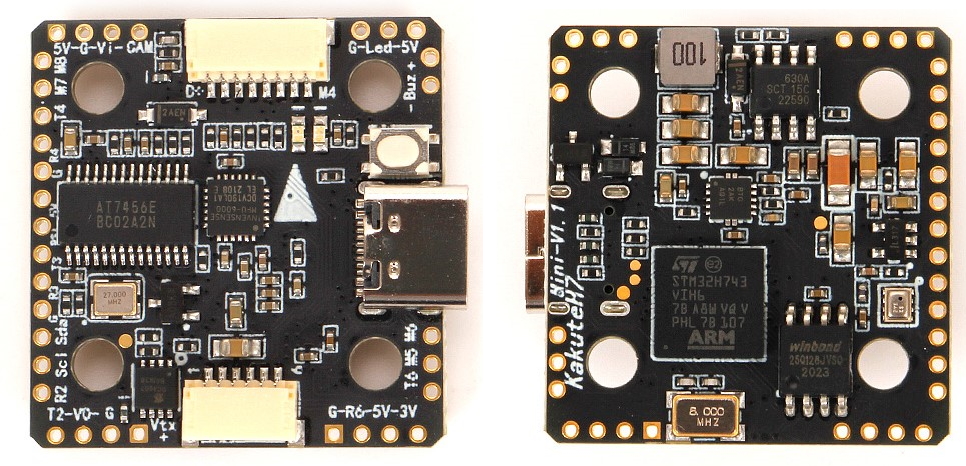
above image and some content courtesy of Holybro
Specifications¶
Processor
STM32H743 32-bit processor
AT7456E Video processor for OSD
16 MByte (v1.1) / 128 MByte (v1.3, v1.5) data flash for logging
Sensors
V1.1: MPU6000, V1.3: BMI270, V1.5: ICM-42688-P (accel & gyro)
BMP280 barometer
Power
7V ~ 26V input power directly from battery
5V 2A supply for peripherals
Interfaces
9x PWM outputs (8 servo/motor + WS2812 LED)
6x UARTs/serial for GPS and other peripherals
1x I2C port for external compass
Battery Voltage and Current Sensor inputs
USB-C port
Switchable VTX power
Analog RSSI input (pin 8)
Buzzer output
Where to Buy¶
v1.1 & v1.3 are discontinued. v1.5 has been unavailable since mid 2025. See Holybro for current availability.
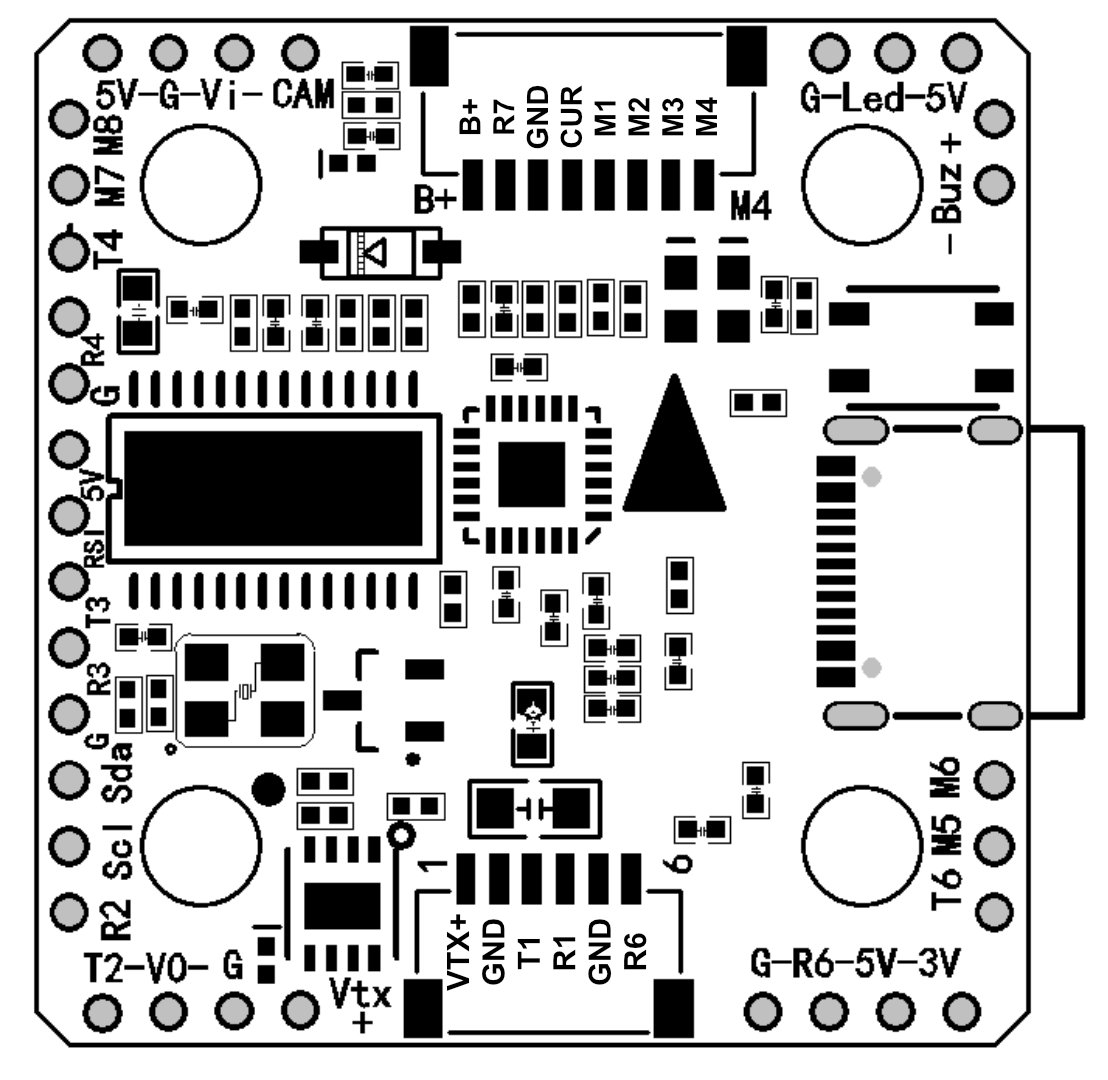
Pinout¶
Pin |
Function |
|---|---|
VTX+ |
9V for HD System or other VTX, by default ON/OFF is controlled by RELAY2. See Relay Switch Can be controlled by RELAY2 |
SDA, SCL |
I2C connection (for peripherals) |
5v |
5v output (1.5A max) |
3v3 |
3.3v output (0.25A max) |
Vi |
Video input from FPV camera |
Vo |
Video output to video transmitter |
CAM |
To camera OSD control |
G or GND |
Ground |
RSI |
Analog RSSI (0-3.3v) input from receiver |
R2, T3 |
UART2 RX and TX |
R3, T3 |
UART3 RX and TX |
R4, T4 |
UART4 RX and TX |
R6, T6 |
UART6 RX and TX (UART6 RX is also located in the GH plug) |
LED |
WS2182 addressable LED signal wire |
Z- |
Piezo buzzer negative leg |
ESC Port¶
Pin |
Function |
|---|---|
B+ |
Battery positive voltage (2S-6S) |
R7 |
UART7 RX |
GND |
Ground |
CURRENT |
CURRENT |
M1 |
Motor signal output 1 |
M2 |
Motor signal output 2 |
M3 |
Motor signal output 3 |
M4 |
Motor signal output 4 |
VTX Port¶
Pin |
Function |
|---|---|
Vtx+ |
9V for HD System or other VTX, by default ON/OFF is controlled by RELAY2. See Relay Switch |
G |
Ground |
T1 |
UART1 TX |
R1 |
UART1 RX |
G |
Ground |
R6 |
UART6 RX |
UART Mapping¶
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
SERIAL0 -> USB
SERIAL1 -> UART1 (DJI Goggles OSD by default) DMA-Enabled
SERIAL2 -> UART2 (Telem2) No DMA
SERIAL3 -> UART3 (GPS) DMA-Enabled
SERIAL4 -> UART4 DMA-Enabled
SERIAL6 -> UART6 (used for RC input and RC telemetry, PPM is not supported) DMA-Enabled
SERIAL7 -> UART7 (Receive only, ESC Telemetry by default) No DMA
RC Input¶
RC input is configured on the R6 (UART6_RX) pin. It supports all RC protocols except PPM. See Radio Control Systems for details for a specific RC system. SERIAL6_PROTOCOL is set to “23”, by default, to enable this.
SBUS/DSM/SRXL connects to the R6 pin but SBUS requires that the SERIAL6_OPTIONS be set to “3”.
FPort requires connection to T6 and SERIAL6_OPTIONS be set to “7”.
CRSF also requires a T6 connection, in addition to R6, and automatically provides telemetry. Set SERIAL6_OPTIONS to “0”.
SRXL2 requires a connection to T6 and automatically provides telemetry. Set SERIAL6_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
OSD Support¶
The KakuteH7 Mini supports OSD using OSD_TYPE 1 (MAX7456 driver). The defaults are also setup to allow DJI Goggle OSD support on UART1.
PWM Output¶
The KakuteH7 Mini supports up to 9 outputs. M1 to M4 are accessed via the connector and are bi-directional capable. M5-M8 and LED are the pads shown on the above diagram. M1-M8 and LED outputs support DShot as well as all PWM types. The PWM is in 5 groups:
PWM 1,4 in group1
PWM 2,3 in group2
PWM 5,6 in group3
PWM 7,8 in group4
PWM 9 in group5 (NeoPixel LED by default)
Note
for users migrating from BetaflightX quads, the first four outputs M1-M4 have been configured for use with existing motor wiring using these default parameters:
FRAME_CLASS = 1 (Quad)
FRAME_TYPE = 12 (BetaFlightX)
Channels within the same group need to use the same output rate. If any channel in a group uses DShot then all channels in the group need to use DShot.
Battery Monitoring¶
The board has a built-in voltage sensor. The voltage sensor can handle up to 6S LiPo batteries. An external current sensor can be attached to pin 4 on the ESC connector.
The correct battery setting parameters are:
BATT_MONITOR 4, if external sensor used; 3 for voltage only
BATT_CURR_PIN 11 , if external sensor used.
BATT_VOLT_MULT 11.1
BATT_AMP_PERVLT should be set to match external current sensor, if used. For example, if the Holybro Tekko32 4in1 ESC is used, this value would be 59.5
Note
these values are already set by default, but can be changed to trim the voltage and/or current as needed, or to suit other ESCs.
Compass¶
The KakuteH7 Mini does not have a built-in compass, but you can attach an external compass using I2C on the SDA and SCL pads.
Logging¶
The KakuteH7 Mini supports on-board data flash logging.
Loading ArduPilot onto the board¶
Initial firmware load can be done with DFU by plugging in USB with the bootloader button pressed. See Loading Firmware onto boards without existing ArduPilot firmware
Firmware¶
Firmware for this board can be found here in sub-folders labeled “KakuteH7Mini” (v1.1 & v1.5) and “KakuteH7Mini-Nand” (v1.3).