Underwater Sonar (Analog)¶
This page details the setup of a low-cost analog underwater sonar (aka “fish finder”) and a digitizer to convert the analog readings into NMEA 0183 which can be read by ardupilot. This setup allows measuring the depth of the water below a boat. The sensor described has a maximum claimed a range of 300m and a relatively wide beam of 22deg.
These instructions were provided by OlavA at the bottom of this ardupilot.org blog post

images courtesy of lowarnace.com and actisense.com
Recommended Hardware¶
Lowrance HST-WSBL 83/200 kHz Transom Mount Transducer available from many retailers including amazon.com. Other sensors may also work.
DST-2 200kHz digitizer (discontinued)
Connecting and Configuring¶
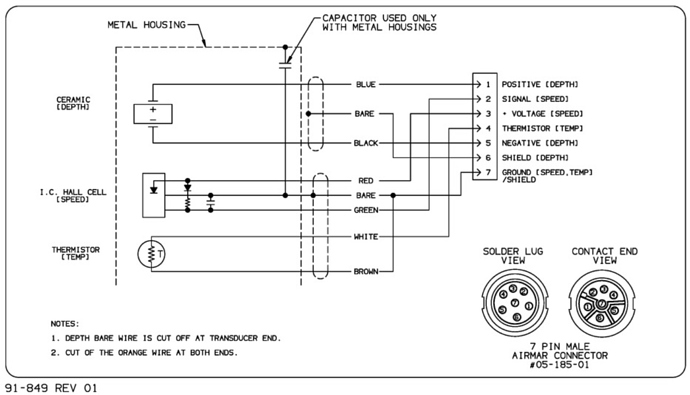
The image below shows the pin-out of an airmar analog transducer, but the pinout is the same as for the Lowrance HST-WSBL
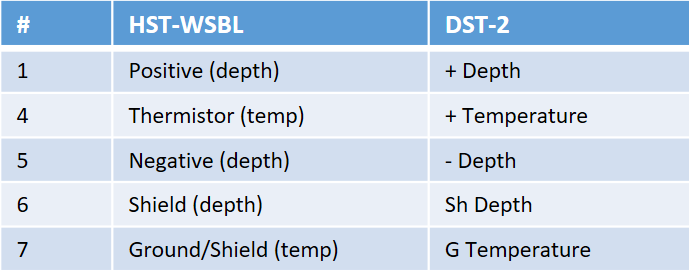
The Lowrance HST-WSBL pins should be connected to the pins on the right side of the DST-2, as shown below. Note that the Lowrance HST-WSBL does not have a speed sensor so only pins 1 and 4-7 should be connected
The DST-2 requires a 10V to 28V power source, meaning it can be powered from a 3S or 4S lipo battery.
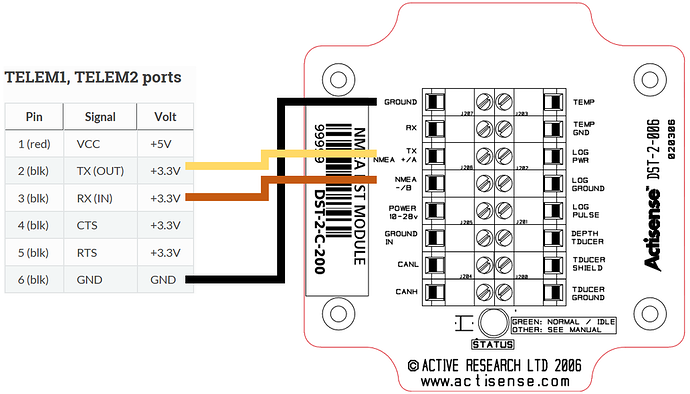
Next pins on the left side of the DST-2 (serial and RS-232 output) should be connected to the autopilot’s telemetry/serial input. The easiest connection method is to connect the DST-2’s 5V serial output directly to the telemetry port of the autopilot’s Tx, Rx, and common ground. It is best to check the DST-2 docs before connecting but below shows how the telemetry pins from a Pixhawk (or another autopilot) should be connected to the pins on the left side of the DST-2.
Connect with a ground station to the autopilot and set the following parameters (these settings assume the first sensor is connected to Telem2/Serial2)
SERIAL2_PROTOCOL = 9 (Lidar)
SERIAL2_BAUD = 4 (4800 baud)
Then the following range finder related parameters should be set:
RNGFND1_TYPE = 17 (NMEA)
RNGFND1_MIN = 0.13
RNGFND1_MAX = 300 (i.e. 300m). This is the distance in meters that the rangefinder can reliably read.
RNGFND1_ORIENT = 25 (i.e. down) if mounted on a boat
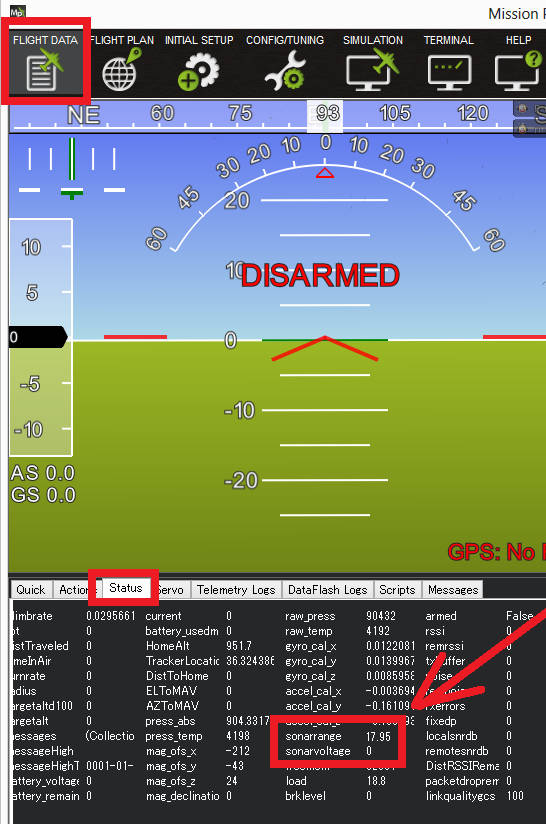
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.