Nanoradar MR72¶
Note
Support for this sensor is available in firmware versions 4.5 and later. Plane does not support this sensor since its a Proximity sensor.
The MR72 is 77Ghz-band radar commonly used for object avoidance/detection. Currently only connection via CAN is supported. Serial versions of this Radar isn’t officially supported.
Connecting via CAN¶
Setup the sensor through the NSM Software. In particular set the “ID” to a unique number if planning to use multiple MR72 on a single CAN bus. You can also set the bitrate from the software.
Note
ArduPilot does not currently support same CAN rangefinders connected to different CAN ports. If you would like yo use multiple CAN rangefinders together, connect them to the same bus.
Connecting to the Autopilot¶
Setup the sensor through the NSM toolprovided by the manufacturer. More details can be found here. Set the “ID” to a unique number if planning to use multiple MR72 on a single CAN bus. You can also set the bitrate from the software to match the CAN bus bitrate (500000 is recommended).
For autopilot connection you can use any spare CAN port. Since this is not a DroneCAN based sensor, you will not be able to use the connected port with any other sensor. The diagram below shows how to connect to CAN2.
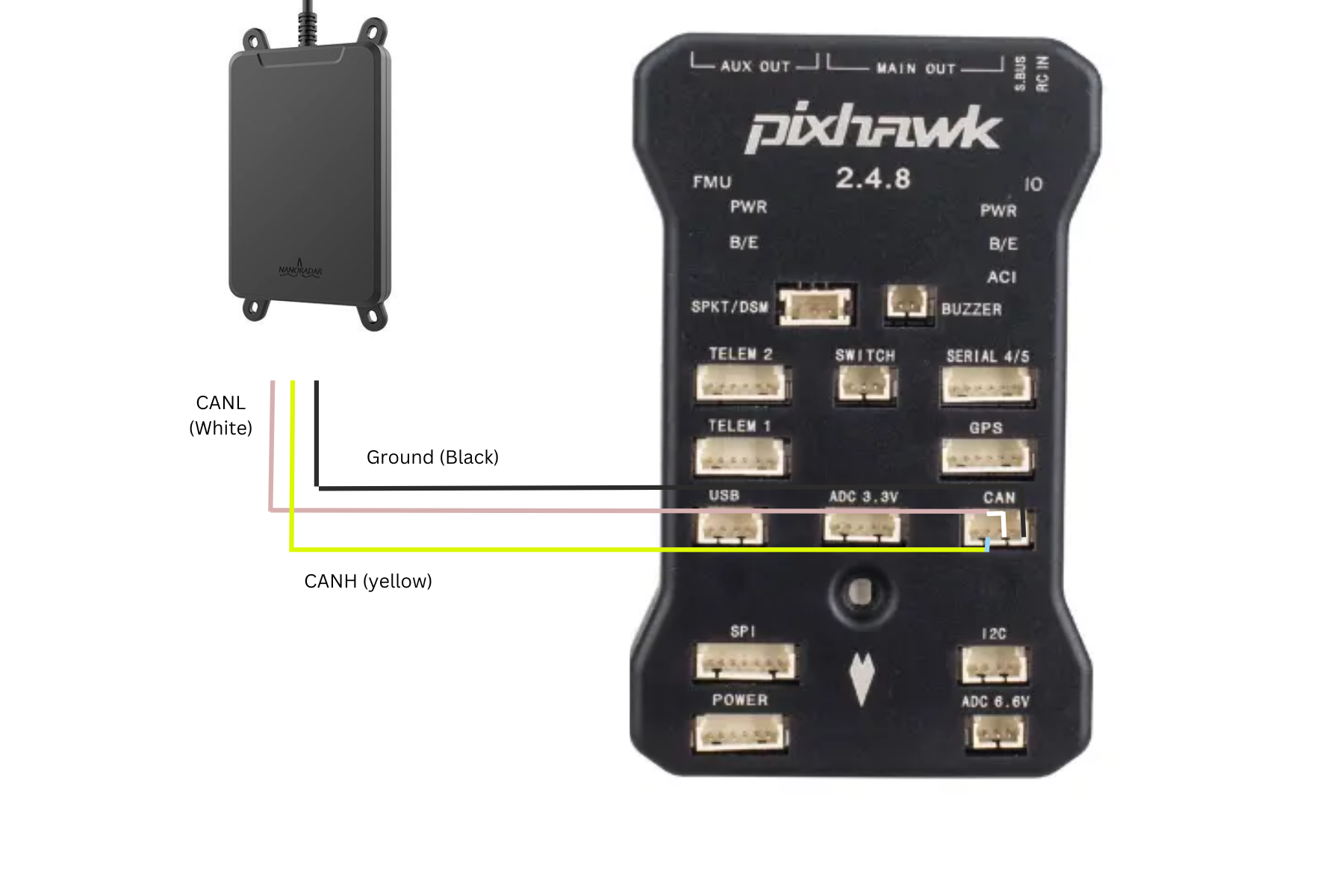
Set the following parameters
CAN_P2_DRIVER = 2 (to enable the 2nd CAN port using the second CAN driver)
CAN_P2_BITRATE = 500000 (Or as set in NAssistant)
CAN_D2_PROTOCOL = 14 (RadarCAN)
PRX1_TYPE = 17 (MR72_CAN) Reboot after setting this.
PRX1_ORIENT = “0” if mounted on the top of the vehicle, “1” if mounted upside-down on the bottom of the vehicle.
PRX1_YAW_CORR allows adjusting the forward direction of the unit. One way to determine this angle is to use the Mission Planner’s Setup >> Advanced, Proximity viewer and then walk around the vehicle and ensure that the sector distances shorten appropriately.
PRX1_IGN_ANG1 and PRX1_IGN_WID1 should be left at default.
More details on using this sensor for object avoidance on Copter can be found here.
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.