Archived: NAVIO+ Overview¶
Warning
ARCHIVED ARTICLE
Board is very old, and has been superseded by other Navio (and other) products.
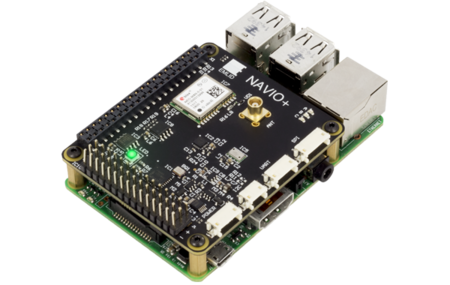
Specifications¶
Processor (Raspberry PI 2)
900Mhz quad-core ARM Cortext-A7 CPU
1GB RAM
Sensors
MPU9250 as main accel, gyro and compass
MS5611 barometer
U-Blox M8N GPS
Power
Triple redundant power supply
Interfaces
UART, SPI, I2C
PWM Sum input
Futaba S.BUS input
13 PWM servo outputs
Dimensions
Weight 12g (shield) + 54g (RPi2)
Size: 55x65mm (shield only)
More details can be found from the emlid.com website.
Developer build information can be found on the ArduPilot dev wiki.