Archived: GPS Failsafe¶
This page covers the set-up and testing of the GPS failsafe.
Warning
ARCHIVED ARTICLE
The GPS Failsafe was merged into/replaced by the EKF / DCM Check & Failsafe in Copter 3.3.
Overview¶
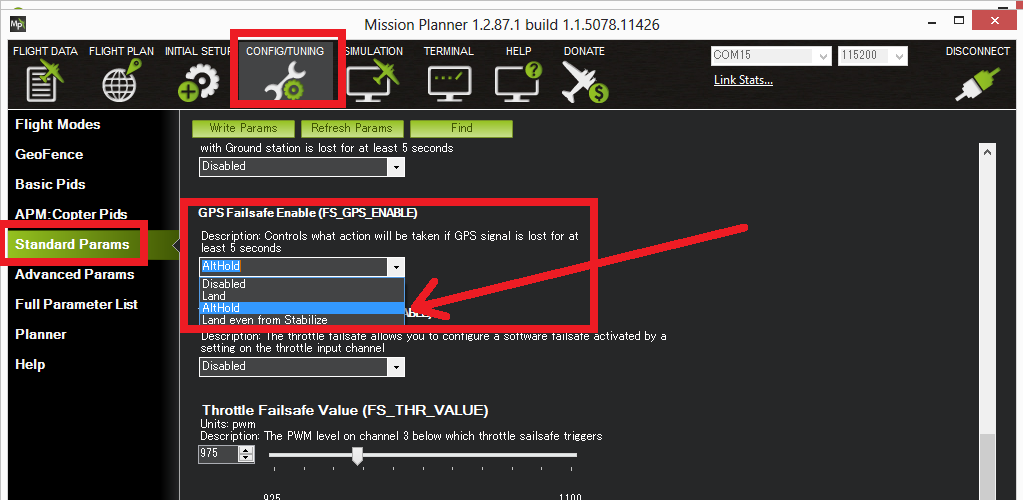
The GPS Failsafe is enabled by default but you can enable or disable it on the Mission Planner’s Standard Parameter List, by set the FS_GPS_ENABLE parameter to 0 (Disable) or 1 (Land) or 2 (switch to AltHold). It is highly recommended to leave it enabled and no known reason why it should ever be disabled.
If you lose GPS lock or experience a GPS Glitch for 5 seconds while in a mode that requires the GPS (Auto, Guided, Loiter, RTL, Circle, Position or Drift) mode it will initiate a Land (or AltHold if FS_GPS_ENABLE is set to 2).
Additional information on the GPS failsafe and Glitch protection can be found here.
Video¶
Below is a video of a simulated GPS Failure resulting in the copter Landing.