Sub Frame Configurations¶
Several bi-directional motor configurations/orientations are available in Sub:
Key to axis: R = Roll, P = Pitch, Y = Yaw, Z= Depth, F = Forward, L = Lateral
#MOTORS |
NAME |
Controllable Axes |
|
|---|---|---|---|
0 |
6 |
BlueROV1 |
R/P/Y/Z/F/L |
1 |
6 |
Vectored |
R/Y/Z/F/L |
2 |
8 |
Vectored_6DOF |
R/P/Y/Z/F/L |
3 |
8 |
Vectored_6DOF-90 |
R/P/Y/Z/F/L |
4 |
3 |
SimpleROV-3 |
Y/Z/F |
5 |
4 |
SimpleROV-4 |
R/Y/Z/F |
6 |
5 |
SimpleROV-5 |
R/Y/Z/F/L |
Note
Configurations lacking one or more controllable axes rely on proper CG and ballast to maintain earth-frame stability in that axis.
Note
The Vectored frame has a MOT_FV_CPLNG_K parameter that can be adjusted to limit hydrodynamic coupling between the vertical and (direction-dependent) “rear” horizontal thrusters, at the expense of reduced forward/backward thrust capacity while moving quickly up or down.
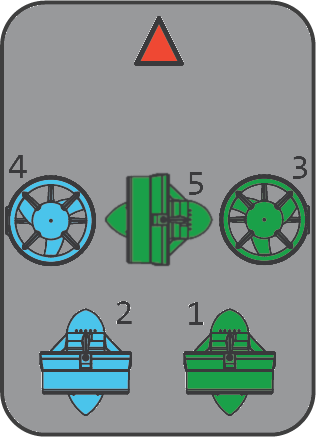
Frames¶
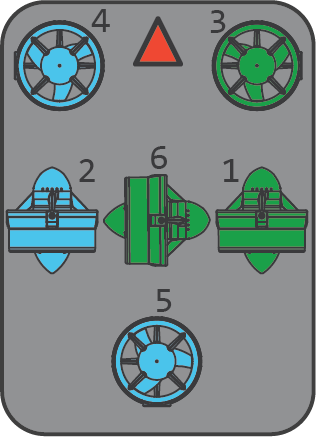
For reference, the following frame configuration diagrams show rough thruster locations and orientations from a top-down view. Where possible thrusters acting along a shared axis should be set to counter-rotate, to minimise incidental torque generation (e.g. green indicates clockwise propellers, and blue counter-clockwise (or vice-versa)).
BlueROV1 Configuration with 6-DoF
thruster positioning.
(Frame
bluerov) |
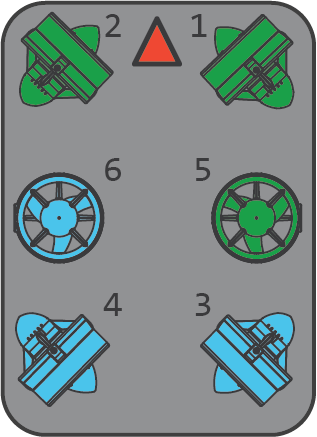
Vectored ROV with side-by-side
vertical thrusters. Used for the
BlueROV2.
(Frame:
vectored) |
Vectored-6DoF ROV w/ Four Vertical Thrusters,
an 8-thruster configuration with 6-DoF control
and heavy lifting capacity. Used for the
BlueROV2 Heavy.
(Frame:
vectored6dof) |
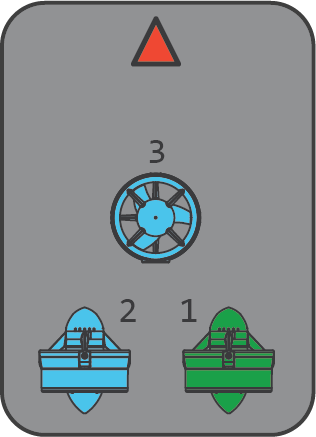
ROV with a single vertical thruster.
(Frame:
simplerov3) |
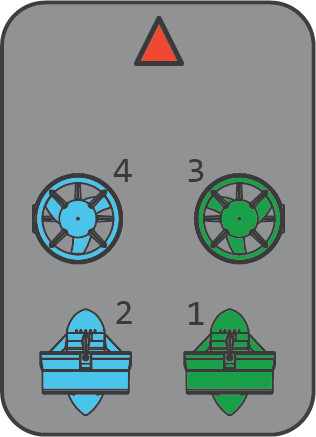
ROV with side-by-side vertical
thrusters.
(Frame:
simplerov4) |
ROV with a lateral thruster and side-by-side
vertical thrusters.
(Frame
simplerov5) |

Changing Thruster Motor Direction¶
Several methods are available:
If brushless, two of the three motor wires can be swapped
If BLHeli or AM32 ESC is being used, the motor direction can be reversed using the ESC configurator tool, either by direct connection or using ArduPilot’s PassThrough Support
The
MOTx_DIRECTIONparameters can be changed.The MOTORDETECT mode can be used while at rest underwater to automatically detect and correct the motor direction for bi-directional thrusters. However, this only affects those thrusters which control Roll, Pitch, and/or Yaw axes.