Introduction to Sub¶
Sub is an advanced open-source autopilot system for submersible ROVs (Remote Operated Vehicle) that supports multiple vehicle configurations. It offers a variety of operating modes from fully manual to fully autonomous, and is designed to be safe, feature-rich, open-ended, and easy to use even for novice users.
Swim Features¶
A robust Attitude and Heading Reference System (AHRS), powered by sensor fusion and inertial navigation algorithms (EKF)
Automatic Attitude Stabilization, Depth Control, and Position Control (assuming configuration and installed sensors allow it)
Fully Autonomous Missions, see Mission Planning
Configurable Failsafes for system component failures, see Failsafes
Subsurface Terrain Following and Surface Tracking, see Sub Modes
Extensive GCS Button Action Support, see Button Inputs in Sub
As part of the broader ArduPilot platform, utilities like simulators, Ground Control Station (GCS) software, and log analysis tools are also available. These can aid in preparing for operations, executing them, and analysing their outcomes and data afterwards.
Vehicle Configuration Options¶
Sub provides access to many functionalities through its fine-grained parameter set, including:
Bi-directional propulsion motors/thrusters, with brushed or brushless construction
Built-in frame configurations for 3/4/5/6 or 8 thrusters, controlling up to all 6 degrees of vehicular motion and axial rotation
Custom configurations are possible too
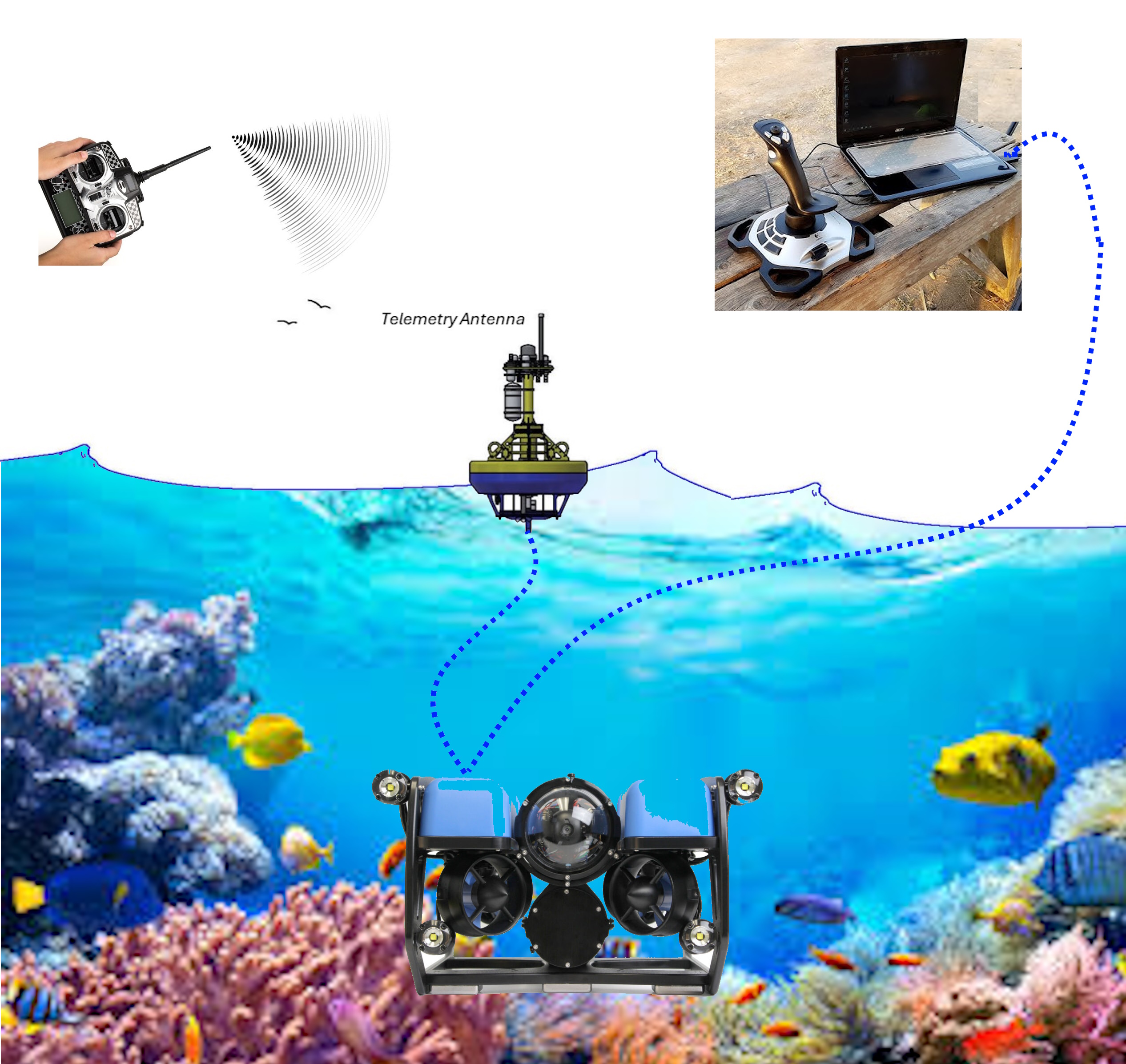
Pilot control and telemetry via cable tether to a Ground Control Station (GCS) using joystick, button, and/or keyboard commands
Radio control via a tethered surface buoy can also be enabled, via parameters
Position and Depth Control using optional depth sensor, GPS while surfaced, Sonars, or Shore / Support Vessel based acoustic beacon locators
Camera gimbal control and stabilization
Lights brightness control, through a joystick or gamepad controller
Gripper control, for object retrieval or manipulation
Leak, Temperature, and internal Pressure sensor options for vehicle safety
Ethernet vehicle peripheral connectivity option for sophisticated sensors like Side Scan sonars
100’s of ArduPilot compatible autopilots to choose from
Optional Linux based companion computer interface to autopilot for simplified configuration, and advanced functionality like image and beacon data processing, sonar displays in the GCS, custom applications, etc.
BlueOS is optimised for ROVs
Analog and Digital Video camera and OSD (On Screen Display) support
Optional Buoyancy Control instead of vertical thrusters/neutral buoyancy
No programming is required for standard operation, but highly detailed interfaces are available for programmatic control (including MAVLink commands), and the autopilot firmware can be freely modified and extended (including through dynamically loaded Lua Scripts).