Setting Motor Range¶
Most ESCs have a dead zone at the bottom of their range. This page outlines how to test the size of the range and then set the spin-when-armed and min throttle values appropriately.
Although not required, advanced users may wish to take the next step by measuring and adjusting the motor thrust curve.
Note
Please complete the ESC calibration before setting the motor range
Measuring the deadzone¶
Remove the propellers from the vehicle
Connect the LiPo battery
Connect the autopilot to the Mission Planner using a USB cable or telemetry
Open the Mission Planner’s Initial Setup >> Optional Hardware >> Motor Test page
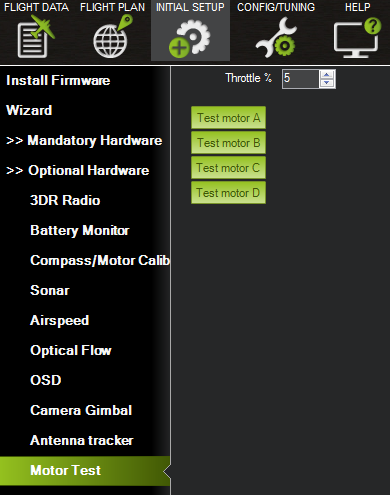
Increase the “Throttle %” field and push each of the “Test motor” buttons to determine what percentage is required for each of the motors to spin. If all ESCs are from the same manufacturer they will likely all have similar dead zones, but having one or two different by 1% ~ 2% is common. Pick the highest percentage of all the motors - we will use this below.
Setting Spin-Armed and Min Throttle¶
By default, when the vehicle is armed but not flying, the motors will spin at a slightly slower than normal speed. This speed can be configured using MOT_SPIN_ARM parameter. Once the vehicle is flying, we want to ensure that we never output a value that causes the motors to stop spinning, this lower limit can be configured MOT_SPIN_MIN parameter.
set the MOT_SPIN_ARM parameter to (the percentage discovered above + 2%) / 100. I.e. if you found the deadzone of the ESCs was 7%, set MOT_SPIN_ARM to 0.09 (i.e (7 + 2) / 100).
set the MOT_SPIN_MIN parameter to at least 0.03 higher than MOT_SPIN_ARM. I.e. if MOT_SPIN_ARM was 0.09, set MOT_SPIN_MIN to 0.12.
Note
Setting MOT_SPIN_MIN even higher than recommended above is acceptable if we want to account for voltage drop of the battery, but setting it too high reduces the lower range of the motors which reduces control which could be important, especially on powerful copters with a low hover throttle.
Note
The MOT_SPIN_MAX parameter to account for the very top of the ESC/motor range which generally produces no additional thrust. By default this value is 0.95 (i.e. top 5% of the range produces no additional thrust).
Note
if ESC RPM telemetry is being used, the TKOFF_RPM_MIN parameter could be set slightly below the MOT_SPIN_ARM parameter to prevent takeoff attempts, and subsequent flips on takeoff, if one or more motors are not spinning.
IDLE State Time¶
If needed, you can add delay between the time the motor idle state is reached and when increased throttle can be applied to the ESCs using the MOT_IDLE_SEC parameter (default is 0 seconds).